Implementación de métodos computacionales para estimar las amplitudes angulares de los miembros inferiores durante el squat
Implementation of computational methods to estimate lower limb angle amplitudes during squat
 PDF
PDF
Recibido: 23 septiembre 2021
Aceptado: 18 febrero 2022
Disponible: 08 marzo 2022
C. F. Blanco-Díaz; C. D. Guerrero-Méndez; M. E. Duarte-González; S. Jaramillo-Isaza, “Implementación de métodos computacionales para estimar las amplitudes angulares de los miembros inferiores durante el squat” TecnoLógicas, vol. 25, nro. 53, e2164, 2022. https://doi.org/10.22430/22565337.2164
Highlights
Resumen
En biomecánica, los sistemas de captura de movimiento basados en video y en marcadores son el método más utilizado para la estimación de parámetros cinemáticos. A nivel técnico, los errores experimentales en la captura de datos suelen estar relacionados con el ocultamiento de los marcadores durante la captura del movimiento. Este fenómeno genera una pérdida de datos que puede afectar el análisis de los resultados. La falta de datos se resuelve aumentando el número de cámaras o utilizando dispositivos adicionales como sensores inerciales. Estas adiciones incrementan el costo experimental de este método. Actualmente, para resolver este tipo de problemas de forma menos costosa, se podrían utilizar nuevos métodos computacionales. Este estudio tiene como objetivo implementar dos métodos computacionales basados en red neuronal artificial (RNA) y regresión de vectores de soporte (RVS) para estimar la amplitud del ángulo de las extremidades durante la ejecución de un movimiento a partir de un solo eje (eje Z). Para entrenar y validar los modelos, se utilizaron características del ejercicio de squat. Los resultados obtenidos incluyeron valores de raíces de error cuadrático medio (RMSE) inferiores a 14 (RMSE mínimo de 5.35) y valores de CC cercanos a 0.98. Los valores estimados son muy cercanos a los ángulos de amplitud experimentales, los análisis estadísticos muestran que no hay diferencias significativas entre las distribuciones y las medias de los valores de amplitud estimados y los valores reales (valor p>0.05). Los resultados demuestran que estos métodos podrían ayudar a los investigadores en biomecánica a realizar análisis precisos, reduciendo el número de cámaras necesarias, reduciendo la incertidumbre y evitando problemas por perdida de datos.
Palabras clave: Redes neuronales artificiales (RNA), análisis biomecánico, análisis de squat, modelado computacional en biomecánica, amplitud angular de miembros inferiores.
Abstract
In biomechanics, motion capture systems based on video and markers are the most widely used method to estimate kinematic parameters. However, from a technical standpoint, experimental errors in data capture are often related to the masking of markers during motion capture. This phenomenon generates data loss that can affect the analysis of the results. The lack of data is solved by increasing the number of cameras or using additional devices such as inertial sensors. However, those additions increase the experimental cost of this method. Nowadays, new computational methods can be used to solve such problems less expensively. This study implemented two computational methods based on Artificial Neural Networks (ANNs) and Support Vector Regression (SVR) to estimate the amplitude of limb angles during the execution of a movement on a single axis (i.e., the z-axis). The characteristics of the squats were used to train and validate the models. The results obtained include RMSE values lower than 14 (minimum RMSE of 5.35) and CC values close to 0.98. The estimated values are very close to the experimental amplitude angles, and the statistical analyses showed no significant differences between the distributions and means of the estimated amplitude values and their actual counterparts (p-value>0.05). The results show that these methods could help biomechanics researchers perform accurate analyses, decrease the number of cameras needed, reduce uncertainty, and avoid data loss problems.
Keywords: Artificial Neural Networks, Biomechanical analysis, Squat analysis, Computational modeling in biomechanics, Lower limb angle amplitudes.
1. INTRODUCCIÓN
La captura de movimiento es uno de los métodos más utilizados en los estudios biomecánicos para la estimación de parámetros cinemáticos como trayectorias, posiciones, velocidades y aceleraciones [
En el mercado se han introducido otras opciones de sistemas de adquisición de datos biomecánicos, desarrollados con diferentes tecnologías tales como: los sensores inerciales [
Los análisis biomecánicos de movimientos altamente involucrados en la vida diaria son de especial interés para la comunidad científica debido a que permiten investigar el manejo de patologías neurológicas y ortopédicas relacionadas a la cotidianidad [
En la literatura, se reportan diferentes estudios donde a través de análisis cinemáticos y dinámicos se genera información relevante para los profesionales de la salud con el objetivo de aumentar las detecciones tempranas de las patologías y así proveer diagnósticos y tratamientos acertados, especialmente en tiempo real [
El movimiento de squat consiste en un ejercicio de entrenamiento el cual siempre ha sido un tema de amplia investigación en el área de la biomecánica, debido a que es un ejercicio que involucra una gran participación de músculos de los miembros inferiores [
A nivel técnico, los errores experimentales durante la adquisición de datos biomecánicos suelen estar relacionados con el ocultamiento de los marcadores durante la captura del movimiento. Este fenómeno es conocido como oclusión y puede causar problemas en la integridad de los datos y dar lugar a diagnósticos erróneos.
Existen diversas soluciones para mejorar la adquisición de datos y reducir la perdida de información por oclusión. Una de ellas es instalar más cámaras en los laboratorios de biomecánica. Sin embargo, el aumento del número de cámaras utilizadas supone un costo económico adicional para la adquisición de sistemas de captura de movimiento. Otra solución que suele implementarse para encontrar la posible información cinemática perdida son las técnicas de interpolación [
Es así como en años recientes se han implementado diferentes técnicas computacionales para verificar y examinar la información registrada en las capturas biomecánicas [
Entre los diferentes métodos computacionales que existen, la inteligencia artificial destaca por su potencial y fácil implementación para clasificar, predecir y evaluar nuevos datos en diferentes ámbitos y condiciones [
En el estudio presentado en [
Finalmente se reporta el uso de máquinas de soporte vectorial (SVM), las cuales han sido utilizadas en el campo de la biomecánica en su mayoría para la clasificación de alteraciones y patologías [
Hasta donde se ha podido identificar, existe en la actualidad un gran interés en la investigación en el área de la biomecánica sobre el desarrollo e implementación de nuevas técnicas computacionales para mejorar la adquisición de parámetros cinemáticos. Este estudio tiene como objetivo estimar la amplitud articular de miembros inferiores (pierna derecha e izquierda) durante el movimiento de squat a partir de la información cinemática obtenida en un solo eje del sistema de referencia y antropométrica de veinte voluntarios, utilizando para ello técnicas de aprendizaje supervisado, tales como la red neuronal perceptrón multicapa y la regresión de vectores de soporte (RVS). A partir de los resultados obtenidos se puede afirmar que esta herramienta permite una estimación de los valores de amplitud articular aproximados a los reales que, en estudios futuros, tendría aplicaciones en la reducción de recursos físicos, la disminución de la oclusión al necesitar solo la información de un eje específico y la adquisición de información biomecánica sin requerir un entorno controlado.
2. METODOLOGÍA
2.1 Diseño experimental
En este estudio, veinte jóvenes voluntarios (diez hombres y diez mujeres), sin acondicionamiento físico y sin ninguna patología que afectara el movimiento, fueron grabados mientras realizaban el ejercicio de squat. En la Tabla 1 se puede observar el promedio de los datos antropométricos de los sujetos que participaron de las pruebas.
Cada uno de los voluntarios firmó un consentimiento informado de acuerdo con las recomendaciones establecidas en la declaración de Helsinki. Antes del ejercicio, el sujeto fue instruido acerca de la ejecución correcta del movimiento; posteriormente, durante el ejercicio, se le solicitó al sujeto de pruebas que realizara el ejercicio de forma repetida buscando obtener un movimiento natural [
Teniendo en cuenta la complejidad del squat y la necesidad inicial de una adecuada resolución y baja incertidumbre, para la toma de muestras de video se utilizaron dos cámaras de alta velocidad Basler AG scA640-70gc con frecuencia de muestreo de 70 cuadros por segundo y, para la digitalización de los videos, los softwares Maxtraq 2D y 3D (Laboratorio de Biomecánica, Universidad Antonio Nariño). Este sistema permite identificar la posición de marcadores reflectantes respecto al tiempo. En la construcción del modelo se utiliza el software de libre acceso Mokka Biomechanics, el cual permite la exportación de los datos de posición y trayectoria de cada marcador. Finalmente, todo el análisis se realiza en el software Matlab R2020a (Campus License Universidad Antonio Nariño).
Para el registro se utilizaron diez marcadores pasivos (ver Figura 1), que fueron ubicados en posiciones articulares y etiquetados siguiendo las recomendaciones de la International Society of Biomechanics (ISB) [
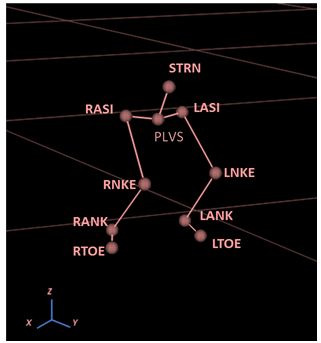
la posición y etiquetado de los marcadores. Fuente: elaboración propia.
2.2 Procesamiento de las señales
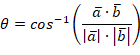
Según el diseño experimental, los datos continuos se segmentaron en un ciclo por persona cuando el sujeto ejecutaba el movimiento de forma natural. Las posiciones de los marcadores se almacenan como señales en una matriz de Mx30. M representa el número de muestras o ejemplos adquiridos y las columnas corresponde a las posiciones XYZ de los diez marcadores.
En este trabajo fueron utilizadas 3184 muestras. La varianza fue calculada para cada eje (ver Tabla 2). Se puede observar en los resultados de la varianza calculada, que el eje que contiene más movimiento de marcadores o mayor varianza matemática corresponde al eje Z.
Fuente: elaboración propia
| Eje\Marcador | RTOE | RANK | RNKE | RASI | PLVS | STRN | LASI | LNKE | LANK | LTOE |
| Eje X | 0.03 | 0.22 | 10.10 | 1.74 | 1.65 | 1.22 | 1.45 | 9.59 | 0.21 | 0.02 |
| Eje Y | 0.08 | 0.67 | 52.52 | 17.64 | 15.16 | 9.47 | 17.10 | 49.60 | 0.57 | 0.04 |
| Eje Z | 0.07 | 0.22 | 8.98 | 88.04 | 116.45 | 126.74 | 88.56 | 7.48 | 0.12 | 0.04 |
Así, la información de los ejes XY fue descartada. Teniendo en cuenta lo anterior, las características utilizadas como entrada de los métodos computacionales corresponde a la diferencia de la posición relativa entre cada uno de los marcadores y un marcador de referencia para cada extremidad correspondiente a los marcadores más estáticos (de menor varianza), para este caso los marcadores de referencia fueron RTOE y LTOE.
El Modelo 1 fue entrenado y evaluado sólo con características extraídas de los marcadores. No obstante, según la literatura, los parámetros antropométricos tienen influencia en la ejecución de movimientos, por lo que es importante tenerlos en cuenta en el desarrollo de un análisis biomecánico [
La salida del algoritmo supervisado corresponde al ángulo de amplitud articular de la rodilla, que es comúnmente calculado a través de las posiciones XYZ de los marcadores RASI, RNKE y RANK para pierna derecha, y LASI, LNKE y LANK para pierna izquierda. Estas amplitudes angulares se cuantificaron usando (1).
Donde θ corresponde al ángulo de amplitud de la pierna derecha o izquierda, a es el vector formado entre RASI y RNKE para pierna derecha, y LASI y LNKE para pierna izquierda.
Por último, b es el vector formado entre RNKE y RANK para pierna derecha, y LKNE y LANK para pierna izquierda.
2.3 Red neuronal perceptrón multicapa
Las características de entrada procesadas fueron ingresadas a una red neuronal Feed-forward de tres capas cuyo esquema es mostrado en la Figura 2. Para el entrenamiento de la red se utilizó el algoritmo Levenberg-Marquardt debido a que el algoritmo de gradiente descendiente puede caer en un óptimo local y las salidas de la red pueden no converger hacia los objetivos. Todos los resultados estimados por el modelo propuesto se han realizado utilizando validación cruzada k-fold con cinco folds, donde la red fue entrenada con el 70 % de los datos y evaluada con el 30 %. Se seleccionó la función sigmoide como función de transferencia de la red desde la capa de entradas hasta las capas ocultas [
de la RNA y el RVS para la predicción de la amplitud de los ángulos de las extremidades
Fuente: elaboración propia.
Para ello, fue realizado un estudio previo donde solo se usaron los datos de entrada correspondientes a las variables biomecánicas (Modelo 1) y una salida correspondiente al ángulo de pierna izquierda. Las diferentes configuraciones fueron: tres configuraciones con una capa oculta de 2, 5 y 10 neuronas (C1-C3), tres configuraciones con dos capas ocultas: 5x5, 10x5 y 5x10, respectivamente (C4-C6), y cuatro configuraciones con tres capas ocultas: 5x5x5, 10x5x5, 5x10x5 y 5x5x10, respectivamente (C7-C10). Las diferentes estructuras se compararon y evaluaron mediante la métrica RMSE presentada en (2).
2.4 Regresión de vectores de soporte (RVS)
La regresión de vectores de soporte (RVS) es una variante del clasificador de máquina de vectores de soporte (SVM), utilizado como esquema de regresión para predecir valores [
2.5 Métricas
La raíz del error cuadrático medio (RMSE, por sus siglas en inglés) mide la cantidad de error que hay entre dos conjuntos de datos, y el coeficiente de correlación de Pearson (CC) es una medida de regresión que pretende cuantificar el grado de variación conjunta entre dos variables. El RMSE y el CC son variables ampliamente utilizadas en estimación biomecánica y técnicas de regresión [
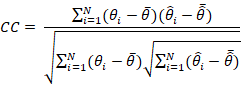 (3)
(3)Donde θ ̂i es el ángulo de amplitud estimado, θi es el ángulo de amplitud verdadero de la muestra i, y N es la longitud de los datos de la amplitud del ángulo. Para este estudio, después de realizar el entrenamiento de los modelos de regresión con el 70 %, se hace la predicción de los modelos con el otro 30 %, donde el RMSE y el CC es calculado para la evaluación de la generalización de los métodos. El procedimiento, se repite a través de la validación cruzada k-fold.
2.6 Análisis estadísticos
El análisis estadístico permite determinar si la amplitud angular estimada por la red neuronal, a pesar de su error, es similar con la amplitud angular real calculada a través de (1). En primer lugar, se realizó un análisis de Kolmogórov-Smirnov para confirmar que el comportamiento de las amplitudes articulares tienen alta probabilidad de tener una distribución normal. Posteriormente, se realizó una prueba de Kolmogórov-Smirnov de dos muestras. La hipótesis nula corresponde a que los ángulos de amplitud estimados y los ángulos de amplitud verdaderos siguen la misma distribución continua. Por otra parte, la hipótesis alternativa es que siguen distribuciones continuas diferentes. El criterio para el análisis significativo fue un valor p de 0.05.
Asimismo, teniendo en cuenta las múltiples hipótesis que hay por cada modelo evaluado, se implementó un análisis de varianza (ANOVA) con un ajuste del valor p con prueba de Bonferroni, con el objetivo de determinar si la diferencia de medias entre el valor real y los modelos de estimación son significativamente diferentes (p < 0.05).
3. RESULTADOS
En la Tabla 4 se puede observar el RMSE para las diferentes configuraciones de la RNA utilizando características biomecánicas y el ángulo de amplitud de pierna izquierda. Con esta información es posible elegir una configuración adecuada para este estudio. Se seleccionó la C3 (1 capa oculta con 10 neuronas) con 300 iteraciones para realizar el análisis, debido a que esta configuración tuvo menos error que las demás.
biomecánicas y el ángulo de menor amplitud Fuente: elaboración propia.
| Configuraciones Número de Iteraciones | C1 | C2 | C3 | C4 | C5 | C6 | C7 | C8 | C9 | C10 |
| 100 | 14.11 | 16.78 | 8.59 | 20.10 | 21.71 | 19.01 | 24.72 | 21.95 | 24.90 | 25.88 |
| 200 | 23.65 | 10.24 | 7.22 | 22.11 | 19.30 | 12.01 | 24.85 | 23.92 | 25.39 | 19.66 |
| 300 | 18.73 | 8.24 | 6.86 | 17.72 | 23.33 | 15.19 | 25.37 | 21.19 | 21.57 | 23.92 |
| 400 | 14.56 | 11.91 | 8.32 | 19.84 | 22.85 | 16.83 | 24.07 | 22.89 | 23.56 | 24.16 |
| 500 | 16.01 | 10.28 | 8.29 | 16.14 | 20.70 | 17.34 | 25.03 | 23.78 | 24.06 | 23.51 |
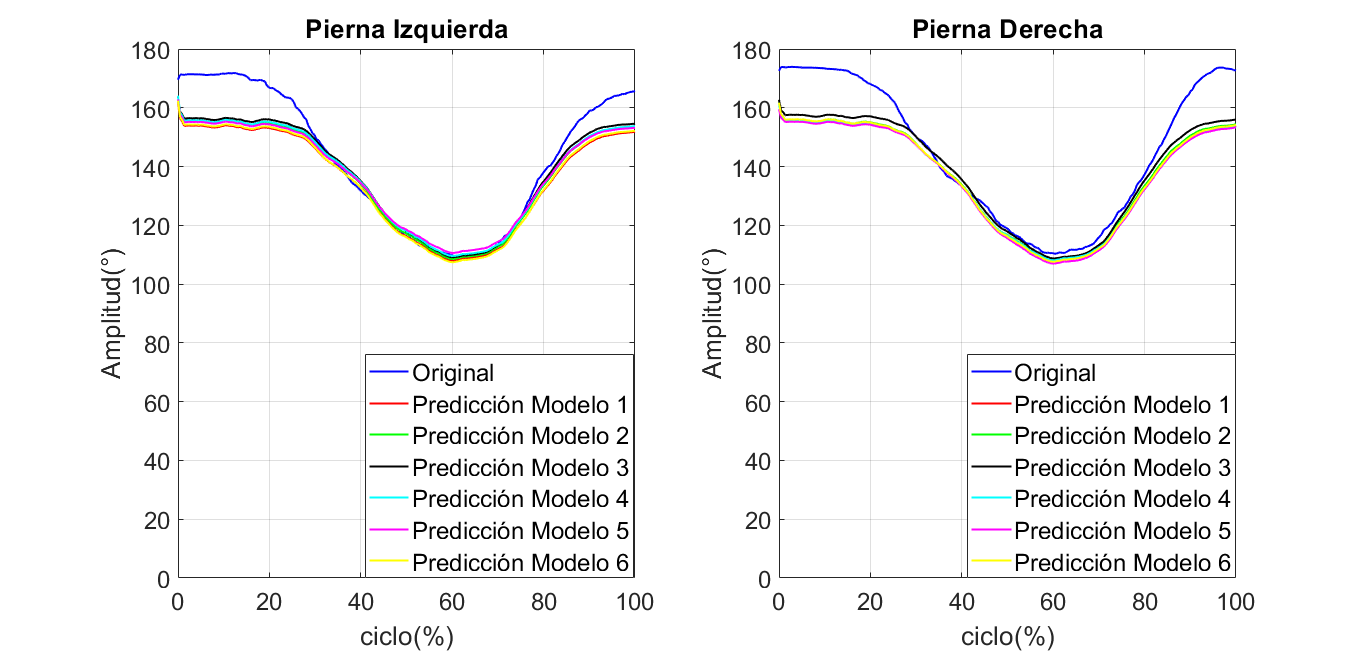
Las Figuras 3 y 4 muestran los resultados de la estimación de los ángulos de la pierna izquierda y derecha de dos sujetos (mujer y hombre) que realizaron el squat . Estos ángulos fueron estimados por la RNA. En estas gráficas, la línea azul representa los ángulos originales, la línea roja indica el ángulo estimado por el modelo 1 de la RNA, y así sucesivamente como se indica en las leyendas de las figuras.
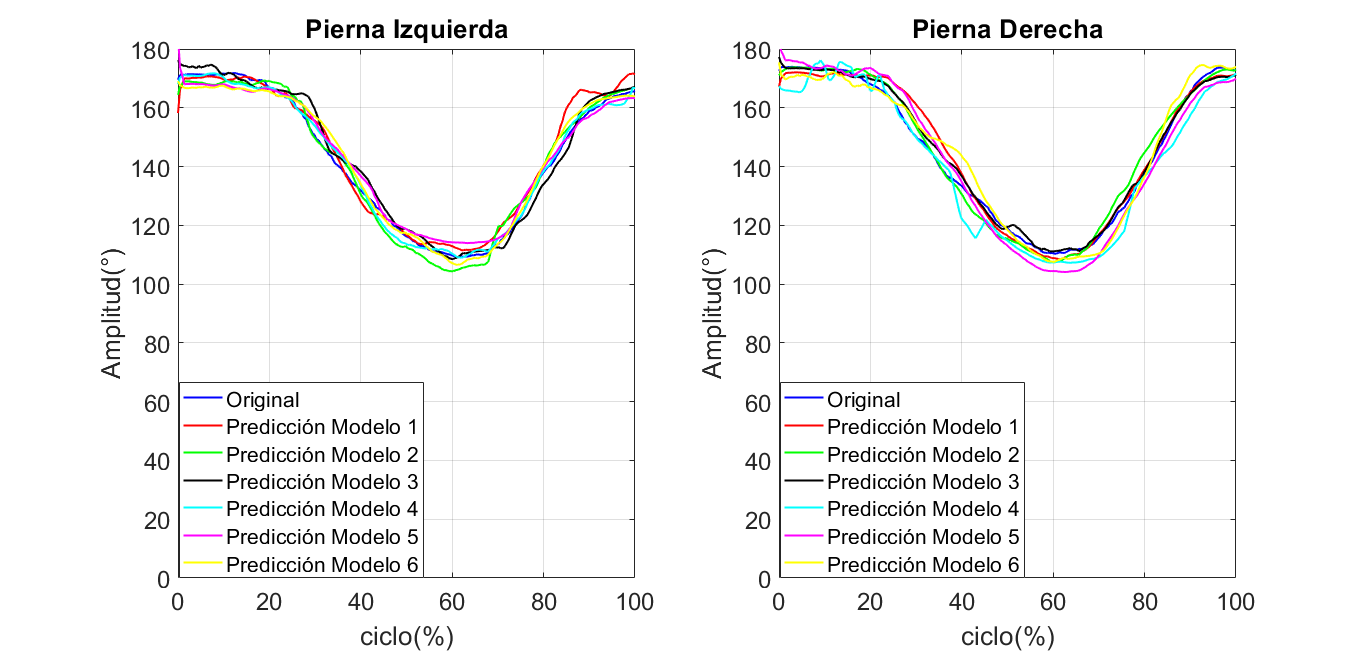
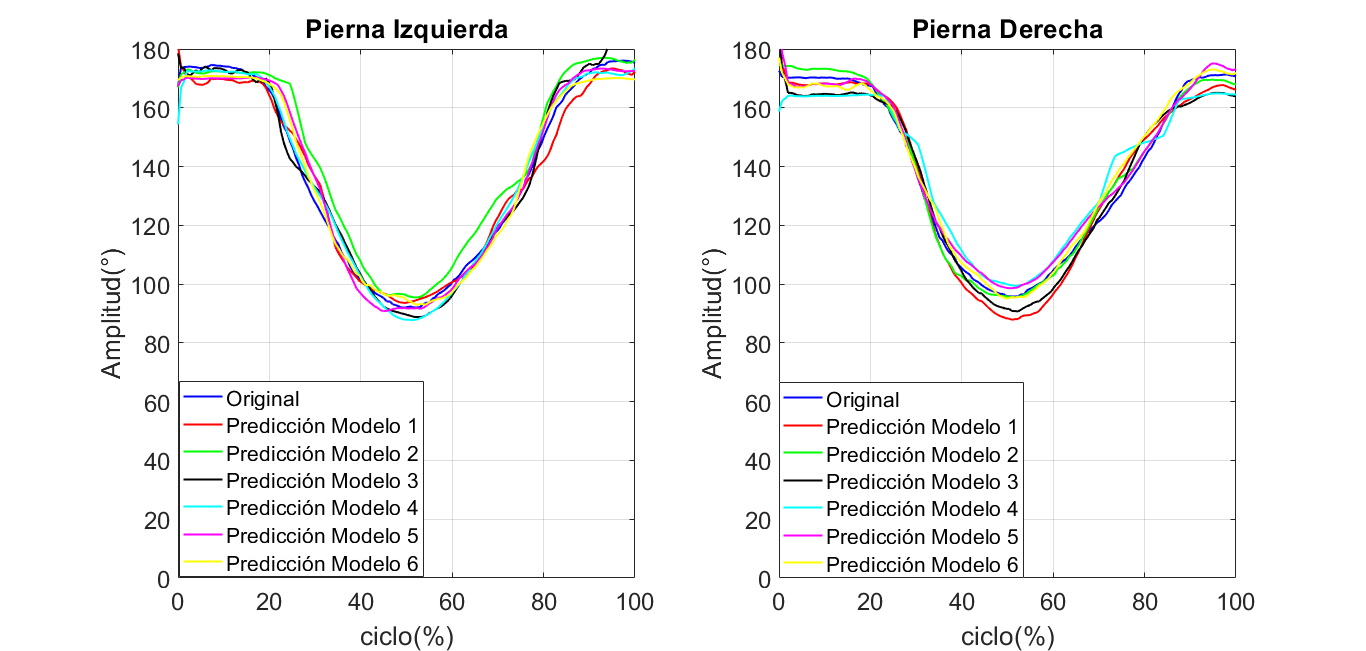
para un sujeto masculino durante el squat. Fuente: elaboración propia.
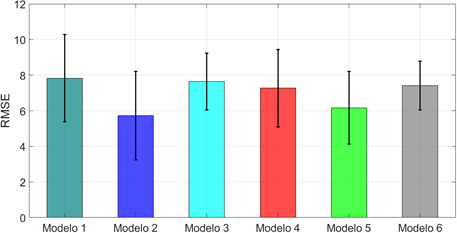
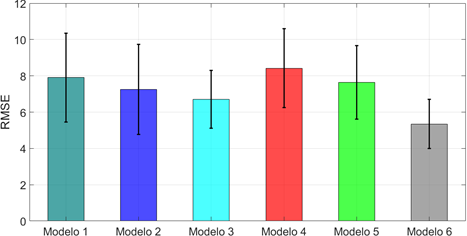
Las Figuras 3 y 4 indican que los ángulos estimados, utilizando los diferentes modelos de RNA, son similares al ángulo original durante la realización del squat. Estos hechos también se pueden comprobar en la Tabla 5 y en la Figura 5 y 6 que muestran la métrica RMSE calculada a través de (2). Por otro lado, la Tabla 5 muestra el CC calculado a través de (3) para todos los modelos de estimación entrenados.
de las extremidades durante el Squat. Fuente: elaboración propia
| Ángulo de pierna izquierda | Ángulo de pierna derecha | ||||
| Modelo | RMSE | CC | Modelo | RMSE | CC |
| 1 | 7.83 | 0.97 | 1 | 7.90 | 0.96 |
| 2 | 5.72 | 0.97 | 2 | 7.25 | 0.95 |
| 3 | 7.65 | 0.97 | 3 | 6.70 | 0.97 |
| 4 | 7.27 | 0.95 | 4 | 8.42 | 0.97 |
| 5 | 6.17 | 0.97 | 5 | 7.64 | 0.97 |
| 6 | 7.42 | 0.97 | 6 | 5.35 | 0.97 |
Fuente: elaboración propia.
El análisis estadístico Kolmogorov-Smirnov para una muestra señaló que los valores de amplitudes articulares para pierna izquierda y derecha tienen alta probabilidad de poseer una distribución normal. Al realizar el análisis de la prueba Kolmogorov-Smirnov de dos muestras entre los ángulos de amplitud estimados por la RNA y los ángulos de amplitud verdaderos, se verifica, para todos los modelos, que siguen la misma distribución continua (valor p > 0.05). Por otro lado, el ANOVA con ajuste de valor p por medio de la prueba de Bonferroni, indica que las medias entre los ángulos de amplitud estimados y ángulos de amplitud verdaderos no poseen diferencias significativas.
Las Figuras 7 y 8 muestran los resultados de la estimación de los ángulos de la pierna izquierda y derecha de dos sujetos (mujer y hombre) que realizaron el squat. Estos ángulos fueron estimados por la RVS. En estas gráficas, la línea azul representa los ángulos originales, la línea roja indica el ángulo estimado por el modelo 1 de la RVS, y así sucesivamente como se indica en las leyendas de las figuras.
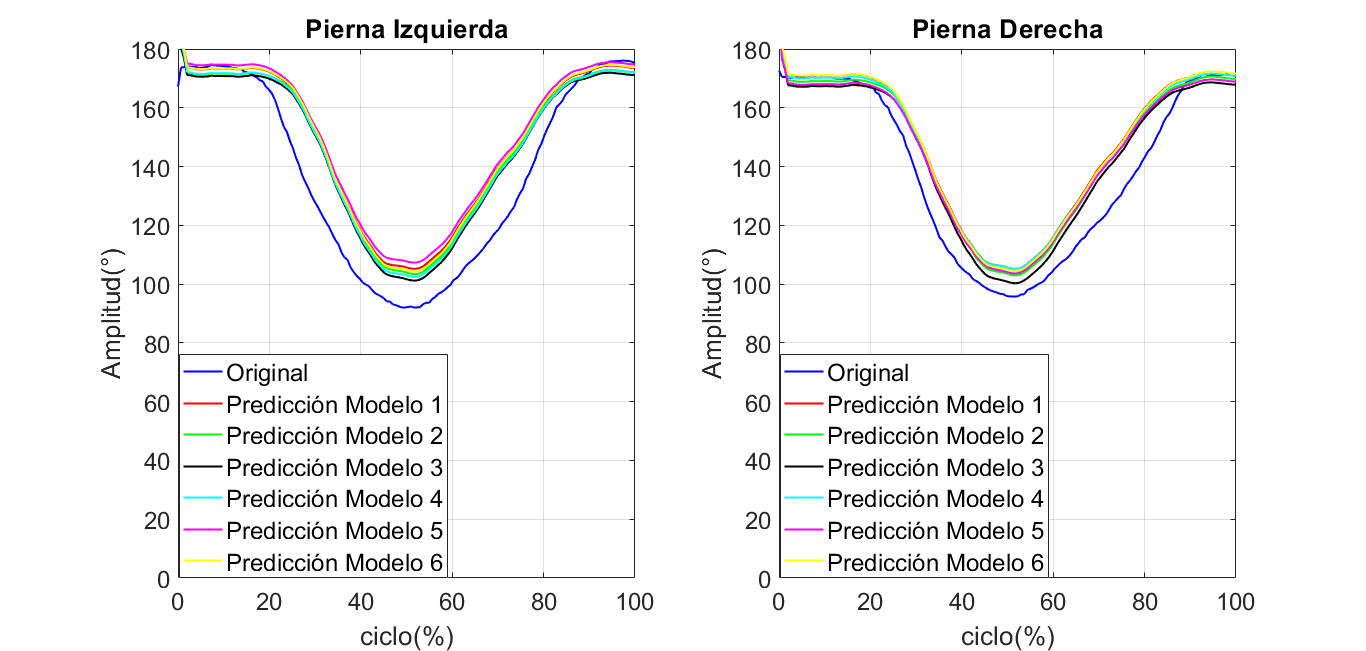
la RVS de cada modelo para un sujeto masculino durante el squat. Fuente: elaboración propia.
Las Figuras 7 y 8 indican que los ángulos estimados, utilizando los diferentes modelos de RVS, son similares al ángulo original durante la realización del squat.
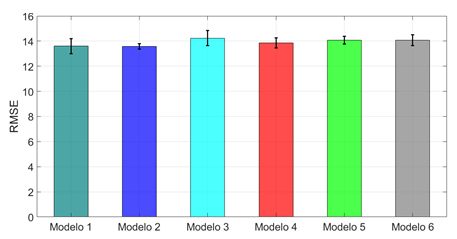
Estos hechos también se pueden comprobar en la Tabla 6 y en la Figuras 9 y 10 que muestran la métrica RMSE calculada a través de (2). Por otro lado, la Tabla 6 muestra el CC calculado a través de (3) para todos los modelos de estimación entrenados.
de las extremidades durante el squat. Fuente: elaboración propia
| Ángulo de pierna izquierda | Ángulo de pierna izquierda | ||||
| Modelo | RMSE | CC | Modelo | RMSE | CC |
| 1 | 14.08 | 0.86 | 1 | 14.66 | 0.85 |
| 2 | 13.60 | 0.87 | 2 | 14.31 | 0.86 |
| 3 | 14.24 | 0.86 | 3 | 14.95 | 0.85 |
| 4 | 13.85 | 0.87 | 4 | 14.72 | 0.85 |
| 5 | 14.07 | 0.86 | 5 | 14.74 | 0.85 |
| 6 | 14.08 | 0.86 | 6 | 14.65 | 0.86 |
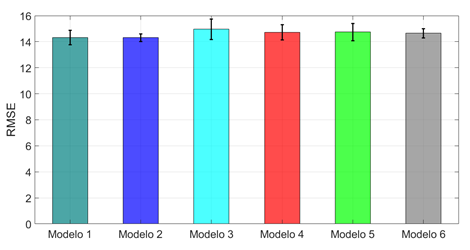
pierna derecha. Fuente: elaboración propia.
El análisis estadístico Kolmogorov-Smirnov para una muestra señaló que los valores de amplitudes articulares para pierna izquierda y derecha tienen alta probabilidad de poseer una distribución normal. Al realizar el análisis de la prueba Kolmogorov-Smirnov de dos muestras entre los ángulos de amplitud estimados por la RVS y los ángulos de amplitud verdaderos, se verifica, para todos los modelos, que siguen la misma distribución continua (valor p > 0.05). Por otro lado, el ANOVA con ajuste de valor p por medio de la prueba de Bonferroni, indica que las medias entre los ángulos de amplitud estimados y ángulos de amplitud verdaderos no poseen diferencias significativas.
4. DISCUSIÓN
Existen varios métodos para corregir los datos perdidos cuando los marcadores reflectivos fallan durante la adquisición de un movimiento, entre ellos se identifican el aumento de cámaras en los laboratorios que permiten una mayor fiabilidad en la adquisición de los datos y la moderación o limitación en la ejecución del movimiento. Sin embargo, esto se traduce en un aumento de costos en la implementación del sistema físico, así como el riesgo de pérdida de información y retrasos durante la sesión [
A partir de los resultados obtenidos y reportados en las Tablas 4 y 5, es posible observar que los modelos implementados en este trabajo tienen un desempeño aceptable para la estimación de la amplitud angular de los miembros inferiores durante la ejecución del ejercicio de squat. Asimismo, se puede observar que para la RNA los modelos 2 y 6 muestran los mejores rendimientos con RMSE de 5.72 y 7.42 grados para pierna izquierda y RMSE de 7.25 y 5.35 grados para pierna derecha, respectivamente. Por otro lado, los valores de CC para los modelos anteriormente mencionados alcanzaron un rendimiento de 0.97 y 0.97 para pierna izquierda y 0.95 y 0.97 para pierna derecha, respectivamente. El modelo 1 tuvo el peor rendimiento con un RMSE de 7.83 grados y un CC de 0.97 en la estimación del ángulo de la pierna izquierda, y RMSE de 7.90 grados y CC de 0.96 en la estimación del ángulo de la pierna derecha. Por su parte, para la RVS, los modelos 2 y 4 muestran los mejores rendimientos con RMSE de 13.6 y 13.85 grados para pierna izquierda y RMSE de 14.31 y 14.72 grados para pierna derecha, respectivamente. Los valore de CC para los modelos anteriormente mencionados alcanzaron un rendimiento de 0.87 y 0.87 para pierna izquierda y 0.86 y 0.85 para pierna derecha, respectivamente. El modelo 3 tuvo el peor rendimiento con valores de RMSE de 14.24 y 14.95 grados y CC de 0.85 y 0.86 para la estimación de ángulos de pierna izquierda y pierna derecha, respectivamente.
Es posible afirmar que el rendimiento de la RNA es superior que el de la RVS por aproximadamente 6 grados de diferencia y 0.10 unidades de correlación. No obstante, al realizar la comparación de los valores de amplitud reales con los valores de amplitud estimados, las pruebas estadísticas determinan que las diferencias de distribución y de medias no son significativas (valor p > 0.05). Igualmente, para ambos métodos el modelo 2 fue el que tuvo mejor rendimiento, por lo que es posible determinar que la variable física de estatura tiene una mayor influencia en la estimación del ángulo, por lo que se recomienda profundizar en esta variable en estudios futuros [
En comparación de los métodos aplicados en este estudio con la literatura, se puede ver una disminución de la incertidumbre; por ejemplo, en [
En este estudio se realizó una reducción en la dimensionalidad de tres dimensiones (XYZ) a una dimensión (Z) debido a un estudio previo de varianzas, en una base de datos de veinte sujetos de prueba. Es posible que al utilizar una dimensión adicional y con mayor cantidad de sujetos, el error disminuya, así como los coeficientes de correlación sean más aproximados a 1, sin embargo, se conoce que mayor número de características en un método de estimación no es equivalente a mejor rendimiento, debido a que puede aumentar el error y el costo computacional en la estimación.
5. CONCLUSIONES
Este estudio demostró que, a pesar de que un movimiento se registre en tres dimensiones, el uso de métodos computacionales, tales como una red neuronal multicapa con una estructura sencilla, o la regresión de vectores de soporte, permite estimar con alta precisión el ángulo de las extremidades involucradas en su ejecución a través de características obtenidas en un solo eje de interés. Este enfoque podría disminuir recursos físicos como el número de cámaras, reducir el problema de oclusión de marcadores y la incertidumbre en la adquisición de información de movimientos biomecánicos.
Hasta donde sabemos, la estimación cinemática del movimiento humano empleando métodos que involucren la inteligencia artificial durante la ejecución de movimientos con varias extremidades en situación de carga real, es un tema que no se ha estudiado a fondo y es todavía un reto abierto para la comunidad científica mundial.
En el presente estudio se implementaron dos métodos computacionales correspondientes a la regresión de vectores de soporte (RVS) y la red neuronal artificial (RNA), perceptrón multicapa para la estimación de la amplitud articular durante el movimiento de squat ejecutada por veinte sujetos de pruebas sin acondicionamiento físico. Teniendo en cuenta que el objetivo de un modelo de estimación es aproximar el valor calculado lo más cercano al valor real (RMSE cercano a 0), en este estudio los valores de los métodos computacionales implementados se encuentran en un rango aceptable, esto se pudo comprobar a través del análisis estadístico donde los resultados de las diferencias entre ambas muestras (estimada y real) fueron no significativos. Esto permite concluir que la RVS y la RNA para el movimiento de squat ofrecen una estimación de amplitud articular con una aproximación considerable a la amplitud articular calculada con el método estándar.
Se podría implementar este tipo de metodologías computacionales para mejorar la precisión en los resultados obtenidos por métodos de adquisición que involucren otro tipo de tecnologías como las cámaras tipo Kinect.
Como trabajos futuros se propone aplicar la presente metodología en otros tipos de movimiento como la marcha o el salto vertical, usando una cantidad mínima de cámaras, y aumentando el número de participantes. Esto permitirá incrementar la generalidad de los métodos, así como la exploración más profunda de características complementarias que puedan optimizar el rendimiento respecto a ciertos parámetros por medio de comparaciones entre diferentes modelos de organización de la red neuronal. Adicionalmente, se podría explorar la posibilidad de implementar este método en un sistema de captura de movimiento que permita la estimación de parámetros cinemáticos en tiempo real.
No obstante, se proponen realizar estudios de optimización de características, es decir, variaciones en la construcción de los modelos usando las características antropométricas de los sujetos, que permitan comparar diferentes modelos de la red neuronal.
6. AGRADECIMIENTOS
El presente trabajo no es producto de un proyecto patrocinado por alguna agencia, organismo o institución. Los autores quieren agradecer a la Universidad Antonio Nariño, particularmente a la Facultad de Ingeniería Mecánica, Electrónica y Biomédica y al semillero de Bioingeniería y Robótica del programa de Ingeniería Biomédica de la sede Bogotá por el acceso a las herramientas físicas y licencias digitales utilizadas en el presente artículo.
CONFLICTO DE INTERÉS
Los autores declaran no tener intereses económicos ni relaciones personales que pudieran influir en el trabajo presentado en este artículo.
CONTRIBUCIÓN DE LOS AUTORES
Cristian Felipe Blanco-Díaz contribuyó en la adquisición de la base de datos, la implementación de los métodos y análisis computacionales, interpretación de resultados y edición del manuscrito.
Cristian David Guerrero-Méndez participó en la implementación de los métodos, análisis computacionales y edición del manuscrito.
Mario Enrique Duarte-González participó en la implementación de los métodos, análisis computacionales, interpretación de resultados y edición del manuscrito.
Sebastián Jaramillo-Isaza contribuyó en la adquisición de la base de datos, interpretación de resultados, en la revisión y edición del manuscrito.
7. REFERENCIAS
- arrow_upward [1] M. Tits; J. Tilmanne; T. Dutoit, “Robust and automatic motion-capture data recovery using soft skeleton constraints and model averaging”, PLoS One, vol. 13, no. 7, p. e0199744, Jul. 2018. https://doi.org/10.1371/journal.pone.0199744
- arrow_upward [2] E. Ceseracciu; Z. Sawacha; C. Cobelli, “Comparison of markerless and marker-based motion capture technologies through simultaneous data collection during gait: Proof of concept”, PLoS One, vol. 9, no. 3, p. e87640, Mar. 2014. https://doi.org/10.1371/journal.pone.0087640
- arrow_upward [3] C. Jakob et al., “Estimation of the Knee Flexion-Extension Angle During Dynamic Sport Motions Using Body-worn Inertial Sensors”, in Proceedings of the 8th International Conference on Body Area Networks, 2013. https://doi.org/10.4108/icst.bodynets.2013.253613
- arrow_upward [4] Y. Ma; K. Mithraratne; N. Wilson; X. B. Wang; Y. Ma; Y. Zhang, “The Validity and Reliability of a Kinect v2-Based Gait Analysis System for Children with Cerebral Palsy”, Sensors, vol. 19, no. 7, pp. 2-14, Apr. 2019. https://doi.org/10.3390/s19071660
- arrow_upward [5] B. F. Mentiplay; K. Hasanki; L. G. Perraton; Y. H. Pua, P. C. Charlton; R. A. Clark, “Three-dimensional assessment of Squats and drop jumps using the Microsoft Xbox One Kinect: Reliability and validity”, J. Sports Sci., vol. 36, no. 19, pp. 2202-2209, Mar. 2018. https://doi.org/10.1080/02640414.2018.1445439
- arrow_upward [6] N. Nakano et al., “Evaluation of 3D Markerless Motion Capture Accuracy Using OpenPose with Multiple Video Cameras”, Front. Sport. Act. Living, vol. 2, May. 2020. https://doi.org/10.3389/fspor.2020.00050
- arrow_upward [7] B. Pueo, “High speed cameras for motion analysis in sports science”, J. Hum. Sport Exerc., vol. 11, no. 1, pp. 53-77, 2016. https://doi.org/10.14198/jhse.2016.111.05
- arrow_upward [8] L. L. Gómez Echeverry; A. M. Jaramillo Henao; M. A. Ruiz Molina; S. M. Velásquez Restrepo; C. A. Páramo Velásquez; G. J. Silva Bolívar, “Human motion capture and analysis systems: a systematic review”, Prospectiva, vol. 16, no. 2, pp. 24–34, Jul. 2018. https://doi.org/10.15665/rp.v16i2.1587
- arrow_upward [9] E. Halilaj; A. Rajagopal; M. Fiterau; J. L. Hicks; T. J. Hastie; S. L. Delp, “Machine learning in human movement biomechanics: Best practices, common pitfalls, and new opportunities”, J. Biomech., vol. 81, pp. 1–11, Nov. 2018. https://doi.org/10.1016/j.jbiomech.2018.09.009
- arrow_upward [10] R. Bartlett, Introduction to Sports Biomechanics. Routledge, 3rd Edition, Routledge, 2014. https://doi.org/10.4324/9781315889504
- arrow_upward [11] T. W. Lu; C. F. Chang, “Biomechanics of human movement and its clinical applications”, Kaohsiung J. Med. Sci., vol. 28, no. 2S, pp. S13–S25, Feb. 2012. https://doi.org/10.1016/j.kjms.2011.08.004
- arrow_upward [12] H. M. Ericksen; A. C. Thomas; P. A. Gribble; C. Armstrong; M. Rice; B. Pietrosimone, “Jump-landing biomechanics following a 4-week real-time feedback intervention and retention”, Clin. Biomech., vol. 32, pp. 85–91, Feb. 2016. https://doi.org/10.1016/j.clinbiomech.2016.01.005
- arrow_upward [13] E. K. Chadwick; D. Blana; A. J. van den Bogert; R. F. Kirsch, “A real-time, 3-D musculoskeletal model for dynamic simulation of arm movements”, IEEE Trans. Biomed. Eng., vol. 56, no. 4, pp. 941–948, Apr. 2009. https://doi.org/10.1109/TBME.2008.2005946
- arrow_upward [14] B. J. Schoenfeld, “Squatting kinematics and kinetis and their application to exercise performance”, J. Strength Cond. Res., vol. 24, no. 12, pp. 3497–3506, 2010. https://doi.org/10.1519/JSC.0b013e3181bac2d7
- arrow_upward [15] J. K. Aggarwal; M. S. Ryoo, “Human activity analysis: A review”, ACM Comput. Surv., vol. 43, no. 3, pp. 16-43, Apr. 2011. https://doi.org/10.1145/1922649.1922653
- arrow_upward [16] S. Almosnino; D. Kingston; R. B. Graham, “Three-dimensional knee joint moments during performance of the bodyweight Squat: Effects of stance width and foot rotation”, J. Appl. Biomech., vol. 29, no. 1, pp. 33–43, Feb. 2013. https://doi.org/10.1123/jab.29.1.33
- arrow_upward [17] P. H. Marchetti et al., “Muscle Activation Differs between Three Different Knee Joint-Angle Positions during a Maximal Isometric Back Squat Exercise”, J. Sports Med., vol. 2016, Jul. 2016. https://doi.org/10.1155/2016/3846123
- arrow_upward [18] L. V. Slater; J. M. Hart, “Muscle Activation Patterns during Different Squat Techniques”, J. Strength Cond. Res., vol. 31, no. 3, pp. 667–676, Mar. 2017. https://doi.org/10.1519/JSC.0000000000001323
- arrow_upward [19] D. J. Glassbrook; E. R. Helms; S. R. Brown; A. G. Storey, “A Review of the Biomechanical Differences Between the High-Bar and Low-Bar Back-Squat”, J. Strength Cond. Res., vol. 31, no. 9, pp. 2618–2634, Sep. 2017. https://doi.org/10.1519/JSC.0000000000002007
- arrow_upward [20] S. Howarth; J. P. Callaghan, “Quantitative assessment of the accuracy for three interpolation techniques in kinematic analysis of human movement”, Comput. Methods Biomech. Biomed. Engin., vol. 13, no. 6, pp. 847–855, Dec. 2010. https://doi.org/10.1080/10255841003664701
- arrow_upward [21] Ø. Gløersen; P. Federolf, “Predicting Missing Marker Trajectories in Human Motion Data Using Marker Intercorrelations”, PLOS ONE, vol. 11, no. 3, p. e0152616, Mar. 2016. https://doi.org/10.1371/journal.pone.0152616
- arrow_upward [22] R. Bartlett, “Artificial Intelligence in sports biomechanics: New dawn or false hope?”, J. Sport. Sci. Med., vol. 5, no. 4, pp. 474–479, Dec. 2006. https://www.ncbi.nlm.nih.gov/pmc/articles/PMC3861744/
- arrow_upward [23] K. Kipp; M. Giordanelli; C. Geiser, “Predicting net joint moments during a weightlifting exercise with a neural network model”, J. Biomech., vol. 74, pp. 225–229, Jun. 2018. https://doi.org/10.1016/j.jbiomech.2018.04.021
- arrow_upward [24] A. Gholipour; N. Arjmand, “Artificial neural networks to predict 3D spinal posture in reaching and lifting activities; Applications in biomechanical models”, J. Biomech., vol. 49, no. 13, pp. 2946–2952, Sep. 2016. https://doi.org/10.1016/j.jbiomech.2016.07.008
- arrow_upward [25] N. Shahid; T. Rappon; W. Berta, “Applications of artificial neural networks in health care organizational decision-making: A scoping review”, PLoS One, vol. 14, no. 2, p. e0212356, Feb. 2019. https://doi.org/10.1371/journal.pone.0212356
- arrow_upward [26] A. R. Zangene; A. Abbasi, “Continuous Estimation of Knee Joint Angle during Squat from sEMG using Artificial Neural Networks”, 27th Natl. 5th Int. Iran. Conf. Biomed. Eng. ICBME 2020, no. Nov. 2020, pp. 75–78, Tehran. https://doi.org/10.1109/ICBME51989.2020.9319429
- arrow_upward [27] D. S. Komaris et al., “Predicting Three-Dimensional Ground Reaction Forces in Running by Using Artificial Neural Networks and Lower Body Kinematics”, IEEE Access, vol. 7, pp. 156779–156786, Oct. 2019. https://doi.org/10.1109/ACCESS.2019.2949699
- arrow_upward [28] V. Bazarevsky; I. Grishchenko; K. Raveendran; T. Zhu, F. Zhang; M. Grundmann, “BlazePose: On-device Real-time Body Pose tracking”, Jun. 2020. https://arxiv.org/abs/2006.10204
- arrow_upward [29] C. Blanco-Diaz; C. D. Guerrero-Mendez; M. E. Duarte-González; S. Jaramillo-Isaza, “Estimation of Limbs Angles Amplitudes During the Use of the Five Minute Shaper Device Using Artificial Neural Networks”, CCIS series, pp. 213-224, Sep. 2021. https://doi.org/10.1007/978-3-030-86702-7_19
- arrow_upward [30] C. F. Blanco Diaz; A. Katerine Quitian González; S. J. Isaza; A. D. Orjuela-Cañón, “A Biomechanical Analysis of Free Squat Exercise Employing Self-Organizing Maps”, in 2019 IEEE ColCACI, Jun. 2019, pp. 1–5. https://doi.org/10.1109/ColCACI.2019.8781991
- arrow_upward [31] V. K. Ojha; A. Abraham; V. Snášel, “Metaheuristic design of feedforward neural networks: A review of two decades of research”, Eng. Appl. Artif. Intell., vol. 60, pp. 97–116, Apr. 2017. https://doi.org/10.1016/j.engappai.2017.01.013
- arrow_upward [32] R. K. Fukuchi; B. M. Eskofier, M. Duarte; R. Ferber, “Support vector machines for detecting age-related changes in running kinematics”, J. Biomech., vol. 44, no. 3, pp. 540–542, Feb. 2011. https://doi.org/10.1016/j.jbiomech.2010.09.031
- arrow_upward [33] F. O. López-Pabón; T. Arias-Vergara; J. R. Orozco-Arroyave, “Cepstral Analysis and Hilbert-Huang Transform for Automatic Detection of Parkinson’s Disease”, TecnoLógicas, vol. 23, no. 47, pp. 93–108, Jan. 2020. https://doi.org/10.22430/22565337.1401
- arrow_upward [34] C. F. Blanco-Díaz; A. K. Quitian-González, “Análisis biomecánico del ejercicio sentadilla libre en sujetos sin acondicionamiento físico”, Rev. Ontare, vol. 6, Dic. 2018. https://doi.org/10.21158/23823399.v6.n0.2018.2423
- arrow_upward [35] R. Baker, “ISB recommendation on definition of joint coordinate systems for the reporting of human joint motion—part I: ankle, hip and spine”, J. Biomech., vol. 36, no. 2, pp. 300–302, Feb. 2003. https://doi.org/10.1016/s0021-9290(02)00336-6
- arrow_upward [36] P. S. Glazier; G. P. Paradisis; S-M. Cooper, “Anthropometric and kinematic influences on release speed in men’s fast-medium bowling”, J. Sports Sci., vol. 18, no. 12, pp. 1013–1021, Jan. 2000. https://doi.org/10.1080/026404100446810
- arrow_upward [37] R. Contini; R. J. Drillis; M. Bluestein, “Determination of Body Segment Parameters”, Hum. Factors J. Hum. Factors Ergon. Soc., vol. 5, no. 5, pp. 493–504, Oct. 1963. https://doi.org/10.1177/001872086300500508

