A Review in Bess Optimization for Power Systems
Revisión de la optimización de Bess en sistemas de potencia
 PDF
PDF
Received: June 7, 2022
Accepted: December 5, 2022
Available: December 23, 2022
D. Mendoza-Osorio, “A Review in Bess Optimization for Power Systems,” TecnoLógicas, vol. 26, nro. 56, e2426, 2023. https://doi.org/10.22430/22565337.2426
Highlights
Abstract
The increasing penetration of Distributed Energy Resources has imposed several challenges in the analysis and operation of power systems, mainly due to the uncertainties in primary resource. In the last decade, implementation of Battery Energy Storage Systems in electric networks has caught the interest in research since the results have shown multiple positive effects when deployed optimally. In this paper, a review in the optimization of battery storage systems in power systems is presented. Firstly, an overview of the context in which battery storage systems are implemented, their operation framework, chemistries and a first glance of optimization is shown. Then, formulations and optimization frameworks are detailed for optimization problems found in recent literature. Next, A review of the optimization techniques implemented or proposed, and a basic explanation of the more recurrent ones is presented. Finally, the results of the review are discussed. It is concluded that optimization problems involving battery storage systems are a trending topic for research, in which a vast quantity of more complex formulations have been proposed for Steady State and Transient Analysis, due to the inclusion of stochasticity, multi-periodicity and multi-objective frameworks. It was found that the use of Metaheuristics is dominant in the analysis of complex, multivariate and multi-objective problems while relaxations, simplifications, linearization, and single objective adaptations have enabled the use of traditional, more efficient, and exact techniques. Hybridization in metaheuristics has been important topic of research that has shown better results in terms of efficiency and solution quality.
Keywords: Formulations of optimization problems, metaheuristics, convex optimization, battery storage systems, power systems.
Resumen
La creciente penetración de recursos distribuidos ha impuesto desafíos en el análisis y operación de sistemas de potencia, principalmente debido a incertidumbres en los recursos primarios. En la última década, la implementación de sistemas de almacenamiento por baterías en redes eléctricas ha captado el interés en la investigación, ya que los resultados han demostrado efectos positivos cuando se despliegan óptimamente. En este trabajo se presenta una revisión de la optimización de sistemas de almacenamiento por baterías en sistemas de potencia. Pare ello se procedió, primero, a mostrar el contexto en el cual se implementan los sistemas de baterías, su marco de operación, las tecnologías y las bases de optimización. Luego, fueron detallados la formulación y el marco de optimización de algunos de los problemas de optimización encontrados en literatura reciente. Posteriormente se presentó una revisión de las técnicas de optimización implementadas o propuestas recientemente y una explicación básica de las técnicas más recurrentes. Finalmente, se discutieron los resultados de la revisión. Se obtuvo como resultados que los problemas de optimización con sistemas de almacenamiento por baterías son un tema de tendencia para la investigación, en el que se han propuesto diversas formulaciones para el análisis en estado estacionario y transitorio, en problemas multiperiodo que incluyen la estocasticidad y formulaciones multiobjetivo. Adicionalmente, se encontró que el uso de técnicas metaheurísticas es dominante en el análisis de problemas complejos, multivariados y multiobjetivo, mientras que la implementación de relajaciones, simplificaciones, linealizaciones y la adaptación mono-objetivo ha permitido el uso de técnicas más eficientes y exactas. La hibridación de técnicas metaheurísticas ha sido un tema relevante para la investigación que ha mostrado mejorías en los resultados en términos de eficiencia y calidad de las soluciones.
Palabras clave: Formulaciones de problemas de optimización, metaheurísticas, optimización convexa, sistemas de almacenamiento por baterías, sistemas de potencia.
Acronyms
| DER | Distributed Energy Resources | REL | Relaxation of non-convex equations |
| RES | Renewable Energy Systems | GAMS | General Algebraic Modeling System |
| PV | Solar Photovoltaic Systems | MINLP | Mixed-Integer Non-Linear Programming |
| WE | Wind Energy Systems | WOA | Whale Optimization Algorithm |
| FC | Fuel Cells | SA | Simulated Annealing |
| HEE | Hydro-Electrical Systems | ABC | Artificial Bee Colony |
| BESS | Battery Energy Storage Systems | MFABC | Multi-Strategy Fusion ABC |
| LIB | Lithium-ion Battery | MFABC+ | Hybridized MFABC and SA |
| EV | Electric Vehicles | HHO | Harris Hawks Optimizer |
| ANN | Artificial Neural Networks | AOA | Arithmetic Optimization Algorithm |
| SoH | State of Health | hHHO-AOA | Hybridized HHO and AOA |
| SoC | State of Charge | SOCP | Second Order Cone Programming |
| DN | Distribution Network | FA | Firefly Algorithm |
| TN | Transmission Network | HFPSO | Hybridized FA and PSO |
| UPQC | Unified Power Quality Conditioner | ICSO | Inherited Competitive Swarm Optimization |
| PID | Proportional-Integral-Derivative Controller | MAG-PSO | Multi-Agent Guiding PSO |
| FOPID | Fractional Order PID | MFO | Moth Flame Optimization |
| MPC | Model Predictive Controller | MMFO | Modified MFO |
| PFR | Primary Frequency Regulation | GOA | Grasshopper Optimization Algorithm |
| DoD | Depth of Discharge | MOGOA | Multi-Objective GOA |
| DR | Demand response | MOGWO | Multi-Objective GWO |
| PSO | Particle Swarm Optimization | TSIO | Two-Stage Interval Optimization |
| GA | Genetic Algorithm | DHHO | Developed Harris Hawks Optimization |
| MULTI | Multi-Objective Optimization | ADMM | Alternating Direction Method of Multipliers |
| MILP | Mixed-Integer Linear Programming | DC-ADMM | Dual-Consensus version of ADMM |
| STOC | Stochastic Optimization | WOAGA | Hybrid WOA-GA |
| GWO | Grey Wolf Optimization | MOWOAGA | Multi-Objective WOAGA |
| BLO | Bi-Layer Optimization | BWOA | Black Widow Optimization Algorithm |
| RO | Robust Optimization | HSMGWO | Hybridized Halton sequence and Social Motivation Strategy GWO |
| ML | Machine Learning | ASO | Atom Search Optimization |
| OPF | Optimal Power Flow | ALA-mQPSO | Hybridized Adaptive Local Attractor-based and Quantum-behaved PSO |
| MH | Metaheuristics | IPM | Interior-Point Methods |
| NSGA | Nondominated Sorting Genetic Algorithm | GDM | Gradient Descent Methods |
| B&B | Branch and Bound method | NM | Newton’s Method |
| TOPSIS | Technique for Order Preference by Similarity to Ideal Solution | ||
| RPNS | Reference-Point-Based Non- Dominated Sorting | ||
| GSA | Gravitational Search algorithm | ||
| CPSOGSA | Hybridized Chaotic map algorithm with PSO and GSA |
1. INTRODUCTION
Distributed Energy Resources (DER) is a term given to the set of energetic resources that are operated in a decentralized way and are typically, but not necessarily exclusively, driven by uncertain primary resources, like Renewable Energy technologies (RES) such as Solar Photovoltaic (PV) and Wind Energy (WE), or more predictable ones like Hydrogen Energy with Fuel Cells (FC) or Hydro-Electrical Energy (HEE) with micro turbines [
Battery Energy Storage Systems BESS, whose technology is part of DER even though they cannot be considered as proper generation, have the particularity to behave dually: can operate as a load (withdraw energy) or as a support for generation (analogous to a generator). During BESS operation, it storages (charges) or releases (discharges) energy obtained from an external source through electrochemical processes. This behavior, together with the flexibility in controllability and power ramping rate, make their operation especially useful to provide supplementary services in the operation of power systems [
As mentioned before, BESS are mainly implemented to provide additional services to power systems either in transmission or distribution [
| Service | Category | Timeframe | References |
| Transient Voltage Stability | Technic (Power Quality) | Very Short (ms) | [ |
| Harmonic Mitigation | Technic (Power Quality) | Very Short (ms) | [ |
| Peak load and generation mitigation | Technic (Power Quality) | Very Short (ms) | [ |
| Primary Frequency Control | Technic (Power Quality) | Very Short – Short (ms-s) | [ |
| Virtual Inertia | Technic (Power Quality) | Short (s) | [ |
| Black start | Technic (Power Quality) | Short(s) | [ |
| RES variability mitigation | Technic (Power Quality) | Medium (min.) | [ |
| Voltage Management | Technic (Power Quality) | Medium (min.) | [ |
| Secondary Frequency Control | Technic (Power Quality) | Medium (min.) | [ |
| Demand Response | Technic /Economic | Long (hrs.) | [ |
| Energy arbitrage | Economic | Long (hrs.) | [ |
| Off-grid Operation | Technic/Economic (self - consumption) | Long (hrs.) | [ |
| Power Loss minimization | Technic (efficiency) | Long (hrs.) | [ |
| Congestion Relief | Technic (Power Quality) | Long (hrs.) | [ |
| Distribution and Transmission deferral | Economic | Long (hrs.) | [ |
Modelling BESS for its implementation in power systems has been realized using diverse methods depending on the objective of analysis and its timeframe. For instance, in [
BESS integration in active distribution networks, or microgrids, is usually analyzed in static BESS frameworks, this means that their mobility is not considered. However, Mobile BESS, MBESS, defines a new structure for operation for BESS, in which different solutions sets for its location, the status (charging, discharging, idle, or transport), and the costs for mobilizing such systems are considered to optimize network operation. Formulating the problem under this operational structure has shown several advantages in comparison with static BESS (Fewer losses, less active and reactive power drawn from substations, and improvements in voltage profiles) [
To examine the steady state effects of DER on active distributed networks, or microgrids, an optimal power flow study is typically performed, formulating the set of nonlinear equations resulting from circuit analysis, defining the operational constraints, such as voltage limits, transformer capacities or line current limits, and objective functions, which all depend on the decision variables.
Regardless of DER technology and the corresponding efficiencies based either on construction or operation, either uncertainties, objective function definition, or the modelling of the operation of the DG units might bring non-convexities to optimal power flow formulation, and with it, increased complexity in the steady-state analysis of the system. Then, additional effort is then needed to analyze the system if the objective function(s) and/or any (or every) additional operational constraint has concave properties in a minimization sense of the problem. Therefore, the way the problem is formulated for analysis defines the way it will be solved, and consequently how efficiently it will get to a solution, i.e., in the optimal dispatch of generators if costs or load shaving schemes are defined for even shorter periods, complex topologies and great dimensions in the power system. If this occurs, then metaheuristic techniques (MH) are useful and powerful tools to find approximate (to global) solutions regardless of the formulation [
In this paper, a review on in optimization methods for operation and implementation of BESS in power systems is presented, and after this introduction, some of the most recent optimization problems regarding BESS operation for ancillary services and their formulations are surveyed in section BESS Optimization Problems. Subsequently, methods used to find the solution are reviewed and categorized with convexity as main criteria and if relaxations were implemented. Finally, results, discussion, and conclusions are presented in their respective sections.
2. OPTIMIZATION PROBLEMS
As mentioned in in the previous section, there is an ample variety of applications of BESS implemented to provide services in power systems, in which the optimization of decision variables will provide the technical, economic, or mixed benefits expected from such frameworks. In this section, the formulation objective functions are reviewed in the context of the ancillary services provided with BESS.
2.1 Voltage Control
Objective functions are defined subject to the type of analysis to be carried out, being classified as transient or steady-state analysis. In Transient Voltage analysis, BESS operation is optimized to reduce voltage deviations in contingencies [

Where Vtkj is the voltage magnitude in the node j at time step t and contingency k, and V0j is the pre-fault initial voltage magnitude. Then an average severity index SIk is formulated to classify the magnitude of the deviations Rtkj by averaging them for each contingency k as in (2). If in any contingency case k, node j or period t no reliability standard (i.e., NERC/WECC, Grid codes [

The objective is then formulated in (3) by complementing the severity index with a maximum voltage recovery sensitivity parameter (Voltage Sensitivity Index VSI), which depends on BESS injected var qes,i (Nes refers to the number of BESS units).

Equation (3) is desired to be optimized in the sense of maximization because it is expected for the node voltage in fault conditions to drop to zero (short-circuit). The problem is constrained to the defined number of BESS units (Nes) using the binary variable zi shown in (4) indicating if the unit is located in node i or not.

In steady state analysis, the aim is to achieve voltage regulation either by imposing grid code limits, by defining a voltage profile to be follow or by supporting transmission operation with local voltage support in distribution networks [

Where the parameter μ defines the voltage profile to be followed. In [

This objective is composed of two cost functions. C1 correspond to the voltage tracking strategy in interfacing TN-DN nodes, formulated as a squared 2-norm in (7), while C2 represents a cost function for BESS dispatch in (8).


Where, γ and ω are defined as positive weights to balance voltage regulation (in C1) and power provision cost (in C2) respectively. Vectors pb and qb are the net power balance between generation and demand. This operation is constrained to SOC, BESS apparent power and node voltage limits, and SOC operation constraints.
In [

This problem is constrained by power flow balance equations, per phase Voltage and Current limits, and SOC limits.
2.2 Harmonic Mitigation
This service is nowadays closely tied to the implementation of DER in power systems, due to the many DC/AC conversions occurring in power electronic stages. In [
2.3 Black Start
BESS can be used to restore service in power generation plants when required. However, BESS overcharge or undercharge are to be avoided in order to preserve its State of Health (SoH) and maximize its life cycle. In [


In (12), Nr is the number of PV units to be active, PPVU is the predicted power of PV per unit, PL the load power (PPV + PBESS) and ∆P is a compensation factor formulated in (14).

In (13), EBESS is the BESS capacity (energy) and EBESSL is the ideal BESS capacity. This problem is constrained to meet power balance equations, BESS and PV power limits, BESS SOC limits, and the PV units number limit.
2.4 Frequency Control
As frequency deviations occur mainly due to the mismatch between generation and demand in transient periods, control strategies are then often implemented to overcome them. In [
Finally, the authors propose two optimization frameworks: optimize parameters for the piecewise function (find optimal values for threshold, load conditions and dead band values) and optimize parameters for SOC alpha values. For those optimization problems, two objective functions were defined: the root mean squared (rms) values for SOC in (15) and frequency deviation in (16).
Where ft – fres represents the frequency deviation at time t, SOCt the state of charge in time t and SOCavg the average SOC in period T.
In [

The benefit from PFR service provision is defined in (18) by the power capacity to provide the service (Pf ) and the PFR clearing price (EPFR):

The benefit from BESS aging is represented in (19) by the optimal operation of BESS maximizing its life (mitigation of charge and discharge cycles, SOC) considering the efficiencies as in (20).


The objective function is built in (21) by aggregating the benefits.

The optimization is later reformulated including a stochastic sequential decision process for intra-day operation strategy. The objective function is then defined in (22) to maximize the expected benefits after deciding based on initial states.

2.5 Demand Response
In [

Where C(t) represents the corresponding cost matrix for each operational item considered in the objective function, as it is shown in (24), and S(t) the binary state matrix for each component (working or shutdown states).

Where Py is the active power and xy is the corresponding cost for the system y, namely Grid-in: electricity tariff, PV: average cost of PV generation, BESS: total cost of the BESS system and Grid-out: Feed in Tariff for PV exports. ΓR is the rated life of BESS, D and DR are the actual and the rated Depth of Discharge (DoD) respectively. CR is the rated amp-hour capacity at rated discharge current and CA is the actual discharge ampere-hour capacity of BESS. Finally, dact is the actual ampere hour discharge.
The cost function for BESS includes a model for Battery cycling aging based on cycle state of charge (SOC=1-DOD) and charge/discharge dynamics relative to rated values. This problem is constrained to power balance and BESS power and SOC limits. The status of Grid-in and Grid-out can’t be operative (a logical one) at the same time. In [

Power balance is defined to be as it is shown in (26).

Besides power balance, the problem is also constrained by the maximum power (for discharge and charge), the SOC and the efficiencies in BESS.
2.6 Power Loss
In [




The EBESS (k) stands for the rated capacity of the kth BESS unit. BESS model includes self-discharge rate σ, efficiencies λ, and SOC.
The problem is constrained to a five percent nodal voltage limit, power flow balance equations, active and reactive power limits in lines, Charge balance in BESS and SOC limits. The location of BESS units is represented with integer variables. It is defined that the initial SOC must be the same as the final, and it is set to 40 %.
2.7 Off-grid Operation
In [




Where TLCC stands for the Total Life Cycle Cost, and it is calculated for each generator type based on the capital cost, Operation and Maintenance (O&M) costs, interest rates and lifetime of each system.
The terms PBESS-D (t) and PBESS-C (t) correspond to the power during discharge and charge in BESS.
The GHGE objective depends on the fuel consumption of the diesel machine and the emission factor for each Greenhouse Gas.
The decision variables are the dimension (size) of each generator. The problem is constrained to the power limits of each generator (energy for BESS), the generation-load active power balance and SOC limits.
2.8 RES Variability Mitigation
In [



This problem is constrained by power flow balance equations and Current, RES power, BESS capacity and SOC limits. SOC are constrained also by efficiencies. In the second layer, Annual Energy Loss, Load Deviation Index (LDI) and BESS utilization are defined as objective functions as depicted in (39).

Where (P ̅ D) and PD(h) are the mean demand and the actual demand at hth hour. Pi,bess-C(h) and Pi,bess-C(h) represent the BESS charging and discharging power in the node i and hour h respectively.
2.9 Cost/profit Optimization
In [

Where R(t) is the revenue, Cbuy the cost of purchasing energy, and CBESS_Day is the cost for BESS degradation in a day, as it is shown in (41) and (42) respectively.


Where δ(t) and γ(t) represent the energy selling and buying prices at time t, respectively. Psell (t) and Pbuy (t) are power exports and imports to/from external network. The Cost for daily BESS degradation is defined implementing DOD, maximum cycle number and parameters fitted from annual capital discount rate. This problem is constrained by active power balance and SOC limits including efficiencies. The status of BESS is defined by integer variables representing charge or discharge statuses.
3. OPTIMIZATION TECHNIQUES
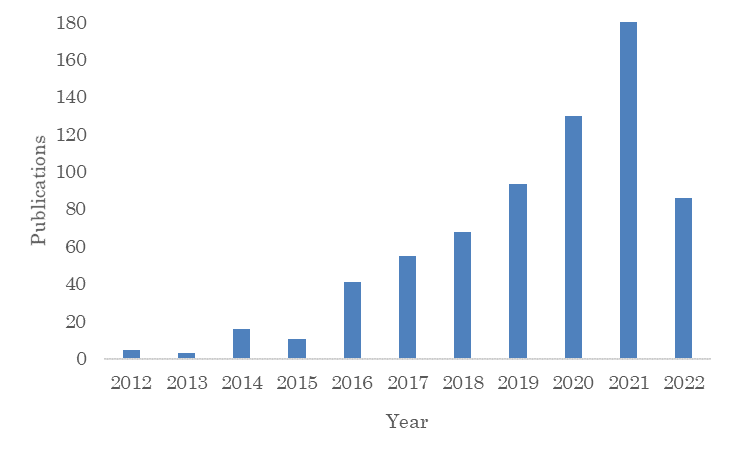
As can be observed in the optimization problem section, recent studies implement analysis techniques depending on the formulation of the problem and the timeframe. In this section, a review from the most encountered optimization techniques and frameworks in recent manuscripts is presented. For this, a search in Web of Science is performed with the key *bess AND optimization, filtered for results published from 2019 on. The date of the search is 04/27/2022. From the search results is possible to see that research in optimization of BESS has been increasing and it can be expected to at least be equal as 2021, as can be observed in Figure 1 (results of 2022 correspond to the research published until the date of search and some programmed publications which are not yet published at the date of search).
The list of results is reduced to 200, and a list of optimization techniques and frameworks is obtained from abstracts. This information is filtered and presented ordered by the appearance count in the right side of Table 2., while in the left side, optimization methods (or frameworks If optimization is performed indirectly) are tagged with the base technique if modifications or hybridizations are proposed.
| Technique/Framework Label | Count | Proposed Technique | Count |
| PSO | 36 | MPC | 5 |
| GA | 26 | SOCP | 4 |
| MULTI | 20 | MAG-PSO | 2 |
| MILP | 15 | DC-ADMM | 2 |
| STOC | 14 | ICSO | 2 |
| GWO | 13 | HHO-AOA | 1 |
| BLO | 12 | HFPSO | 1 |
| RO | 10 | MMFO | 1 |
| ML | 10 | MOGOA | 1 |
| REL | 7 | MOGWO | 1 |
| PID | 6 | MFABC | 1 |
| GAMS | 6 | TSIO | 1 |
| MPC | 6 | DHHO | 1 |
| MINLP | 6 | MOWOAGA | 1 |
| WOA | 6 | MFABC+ | 1 |
3.1 Metaheuristics
From Table 2 could be observed that PSO- and GA- based optimization methods have been predominantly used to find solutions to optimization problems related to BESS implementations and to compare new proposed techniques. In this subsection, the working principle of the most recurrent techniques is briefly explained.
3.1.1 Particle Swarm Optimization
Particle Swarm Optimization (PSO) was first proposed by Kennedy and Eberhart in 1995, inspired by the natural choreography of birds flocking or fish schooling [

Where vkm+1 is the velocity of the particle (initialized random) at the next step, vkm is the velocity at the current step, ω is the inertial coefficient of the particle (weights particle tendency to continue his own direction), c1 is the cognitive acceleration constant (weights particle’s tendency to follow the direction of the best place it has ever found), c2 is the social acceleration constant (weights particle’s tendency to follow the direction of the best place the swarm has ever found), r1 and r2 are random real numbers between zero and one. xkm, pk and g are the actual position of the particle k, the best position found by the particle k and the best position found by the swarm respectively, g and pk positions are related to the value of the decision variables when the objective function reached best global and best particle values respectively. The position of each particle is updated after updating each particle’s velocity as in (44).

Where χ is called constriction factor. This technique has been implemented in the optimization of different problems regarding BESS implementations, e.g. optimal sizing and/or allocation of BESS for power loss [
3.1.2 Genetic Algorithm
Genetic Algorithms (GA) have been developed by Holland since 1965 based on the concept natural selection from Darwin’s Origin of Species. GA are population-based techniques, in which fittest individuals are prone to be selected and from this selection of individual (reproduction), crossover occurs, expecting to obtain new generations of individuals with better genetic properties (traits). After crossover, the process of mutation takes place modifying randomly some genetic contents in individuals of each new generation according to a predefined mutation probability [
During crossover, the binary string is divided in two sections and the position (k) for this division is selected randomly within the size of the binary string. Then two child strings are obtained by keeping the first part of the string of one parent and replacing the second part with the corresponding string part of the second parent, and vice versa. The crossover mechanism is shown in (45).

As it could be observed in Table 2, newer techniques based on GA have been developed and implemented in the optimization in power systems with BESS, e.g., DER performance improvements with smart backup branch [
3.1.3 Grey Wolf Optimizer
Grey Wolf Optimizer (GWO) is a metaheuristic technique proposed by [

Then three positions are defined based on Dk∝, Dkβ, Dkδ as in (47).

Where a1, a2 and a3 are random vectors, and vectors c1, c2 and c3 are set randomly in the range between zero and two as in (48) and (49) respectively.


Where r1 and r2 are vectors between zero and one and a is vector linearly decreasing from two to zero during iterations. Then the position of the omega solutions is updated as in (50) by averaging the positions mentioned in (47).
Exploitation and exploration of the search space is controlled by ax vectors. If for a solution the absolute value of ax is greater than one, then exploration is preferred, otherwise the exploitation is performed. Therefore, it is expected that for the first half of iterations the program should be mainly exploring, while during last part of the program the exploitation should be dominant. This is analogous to the search for the prey (exploration) and the attack to the prey (exploitation) behaviors.
This algorithm has been used to find optimal BESS capacities for reliability and low cost objectives in autonomous AC grid design [
3.1.4 Whale Optimization Algorithm
Whale Optimization Algorithm (WOA) is a technique proposed by Mirjalili and Lewis in 2016 inspired in the foraging behavior of Humpback whales [
In GWO exploration (search for pray) or exploitation (attacking the prey) is performed directly using the equation for position update based on ak. Each k agent (whale) will encircle, attack (exploit) or search (explore) for the pray based on a random p factor (between zero and one) and the respective ak vector value. If the random value p is less than 0.5, then the agents will encircle or search for the pray depending on the absolute value of ak (if |ak|<1 the agent will encircle. It searches for the prey otherwise). If the value of p is greater or equal than 0.5 then the agent will attack the prey. For encircling, search and attack, a different strategy for updating position is executed. If the agent is to encircle the prey, then its updated position will depend on the distance between the position of the agent and ak value, as in (51). Its formulation is shown in (52).


If the agent is to search for the prey, then the position of the agent is updated calculating the distance to another agent selected randomly, as in (53). The new position is described in (54).


The vectors ak and ck are calculated similarly as in GWO, where a is vector linearly decreasing from two to zero during iterations, as shown in (55) and (56) respectively, and the r vector is unified.


The parameter b in (53) defines the shape of the spiral and l is a random number between minus one and positive one. This technique has been implemented in the optimization of different problems regarding BESS implementations, e.g., optimal sizing and/or allocation for power loss minimization [
3.1.5 Harris Hawk Optimization
Harris Hawk Optimization (HHO) based algorithms have also been proposed in the latest studies. This technique is inspired in the foraging behavior of the Harris Hawk and was proposed in [


Where E0 initial energy based on the random parameter r6, ranging from minus one to one in each iteration t. Exploration and exploitation are performed differently depending on random parameters (from zero to one). During exploration, the random parameter q defines the exploration strategy to be carried out. If q is greater or equal to 0.5, then a strategy of perching based on random locations is performed. The exploration is based on the position of other hawks otherwise following the averaged position of all agents. The update of the position of the agents during exploration is executed following (59). The average position of the hawks is described by (60).


Where r1, r2, r3 and q are random numbers from zero to one. xm,t is the average position of the population and UB,LB are the maximum and minimum locations of the population, respectively. During exploitation, the energy of the prey and a random parameter . control the way the hawk attacks the prey. If r ≥ 0.5 and 0.5 ≤|E|<1, then the hawk performs a soft besiege, updating its position in direction to the difference of positions between the agent and the prey ∆x modulated by ∆x and the strength of the prey to jump and scape the attack J. If r < 0.5 and |E|≥0.5 the hawk can update its position either by soft attacking the prey (update its position based on the location of the prey, the strength J and the position of the hawk) or by attacking the prey following the Levy Flight function imitating leapfrog movements on the prey (soft besiege with progressive rapid dives). Firstly, the decision is made by evaluating the objective function of the updated solution when soft-attacking (F(xk,t+1 )) and comparing it with the objective function value of the original solution (F(xk,t)). If F(xk,t+1 ) < F(xk,t) then the updated solution is assigned for the next iteration. If the previous condition is not met, then the objective function value for the updated solution based on the Levy Flight function is now compared against the objective value of the original solution and if the condition F(xk,t+1) < F(xk,t) is met, then the updated solution is assigned for the next iteration. If neither condition is met, then the original solution is preserved. These behaviors are described in (61). The jump strength and the position difference are calculated as in (62) and (63) respectively.



Where LF(D) is a levy flight function, imitating leapfrog movements [
If r ≥ 0.5 and |E|<0.5, then the hawk performs hard besiege by updating its position getting close to the prey depending on the energy of the prey and the absolute value of ∆x. If r < 0.5 and |E|<0.5 then the agent decides of the update strategy similarly as in soft besiege strategy, but utilizing instead of the agent position, the averaged position of the population. This behavior is described in (64).

This technique has been implemented in problems regarding BESS implementations, e.g., optimal sizing and/or allocation of BESS for power loss reductions, investment costs reductions, primary frequency control [
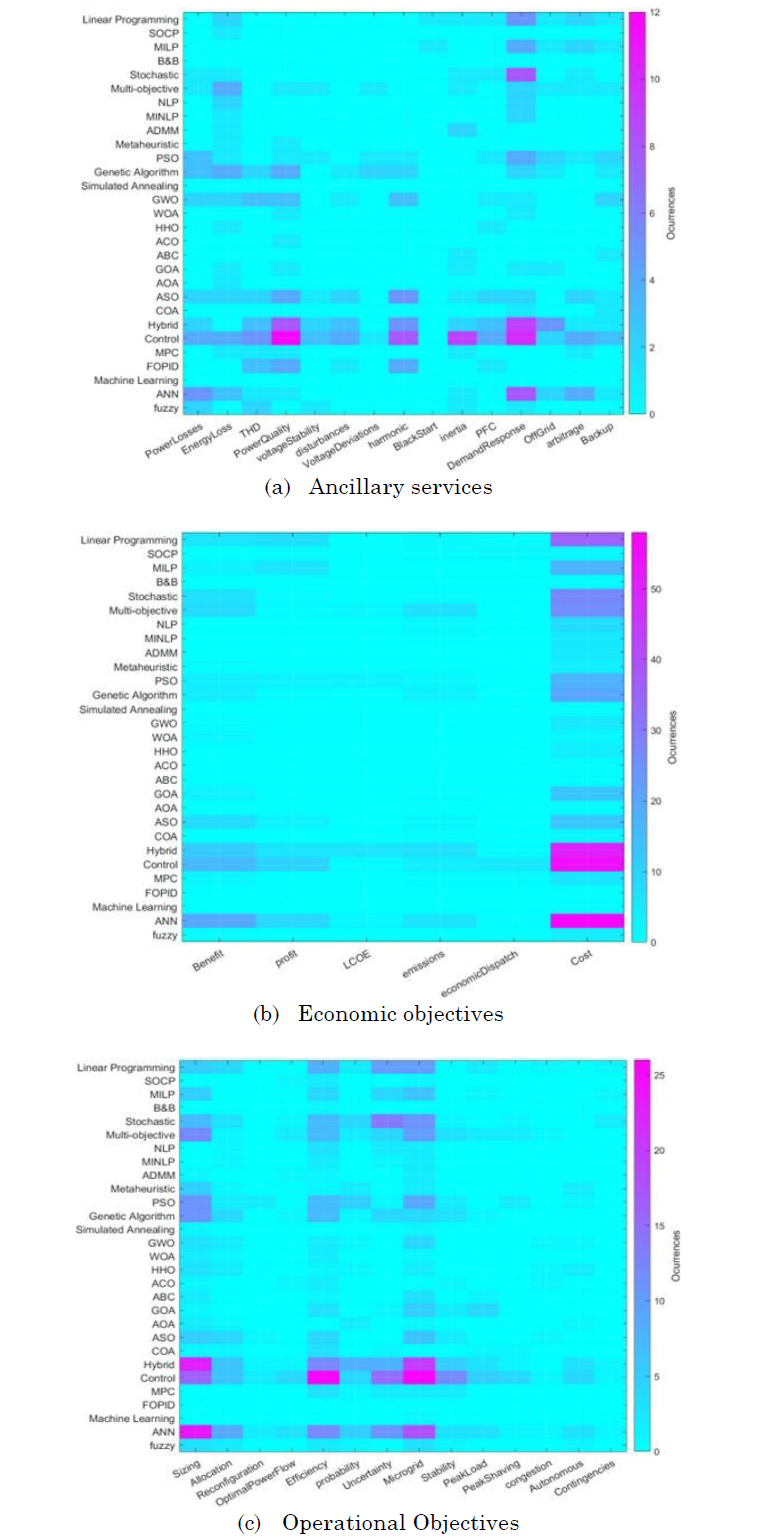
Having in mind the overview in ancillary services shown in Table 1, the review on optimization problems, the techniques shown in Table 2 and the total results of the search, Optimization problems are related to implemented techniques following the number of occurrences in the search and are shown in the color maps displayed in Figure 2.
3.1.6 Multiobjective Optimization
As observed in Table 2, the multi-objective formulation of the optimization problems regarding BESS in power systems has been of interest in the last three years. Multiple objectives are typically handled by reducing the objective space dimension assigning a weight to each objective and aggregating them in a single objective. This allows the optimization problem to be reduced in complexity and depending on the formulation a solution can be found using exact methods (convex optimization) very efficiently. However, the optimization with metaheuristic allows higher than one dimensions in the objective space, since fitness functions can be adapted for each objective function and multiple search strategies based on pareto dominance are applicable to find better optimal fronts of solutions during execution. Due to the complexity of the search strategy and the dimensionality of the objective space, metaheuristic techniques are not as computationally efficient as their convex counterpart and cannot guarantee exactness in the solution. According to the search results, muti-objective adaptation of newer metaheuristic techniques such as GWO, WOA or HHO have been proposed, like in MOGOA, MOGWO. In both methods, a similar strategy as in MOPSO is implemented where non-dominated solutions are compared with the solutions stored in an archive and then saved in the archive if the new solution dominates the one in the archive (the old solution is omitted) or if neither the new solution nor the solutions in the archive dominate each other. If a new solution is dominated by any other in the archive, then it should not be stored in the archive. If the archive is full, a grid mechanism is implemented where most crowded solutions are replaced for solutions in less crowded locations in the objective space to improve diversity in the final approximated Pareto Optimal Front. Best solutions (The best search agent (target) for MOGOA and Alpha, Beta and Delta wolfs for MOGWO) are selected with the roulette wheel method with higher weights for less crowded solutions in the archive [
4. DISCUSSION
From the formulation of optimization problems related to BESS as ancillary services provider could be observed a strong branching in the scope of the analysis to be carried out. When steady state analysis is preferred, then optimization techniques are applied directly over the problem formulation, while, in transient analysis, control strategies are selected, and the optimization is carried out for parameter estimation either online or offline. In this case, Model Predictive Control has been found to be the preferred strategy, since it provides the flexibility of implementing non-linear models and base the action control on predicted behavior of the plant optimizing desired objective functions. This, however, can be a weakness as well since the quality of the predictions depend on the quality of the model.
On the other hand, traditional PID controllers are still being used as control strategy since the model for control is still linear. Although new approaches for its implementation and parameter estimation have been proposed such as FOPID and ANN based control and parameter optimization using MH or ML techniques (Fuzzy logic or ANN) for non-linear models. For steady state analysis, when BESS units are considered behind the meter, the optimization problem is typically constrained by active power balance equations, while in Distribution Networks an AC power flow is used to account power losses. However, the concave nature of AC power flow has also suggested in recent studies to think in linearization (e.g., First order in Taylor Series Expansion, polygon linearization) to simplify the formulation and use convex optimization methods for speeding up the obtention of solution while guaranteeing its exactness. Relaxations on the OPF formulation has been frequently explored in recent studies, specifically by transforming the non-convex quadratic equality constraints present in AC power flow equations (and/or in objectives) into convex second order cone inequality constraints and solving the convex program with SOCP.
During this review, the problem of the optimal allocation (location and sizing) of BESS units was recurrent, and its formulation using AC power flow results in a MINLP problem (MILP if relaxations/linearization eliminate the non-linearity/non convexity in equations). Typically, MILP or MINLP are solved using Branch and Bound Method. (B&B). Such problems include convex transformation of constraints with integer variables and can formulated as an optimization problem using an algebraic approach with GAMS. Due to the flexibility of MH in finding solutions to any kind of problems (convex and non-convex), Multi-objective MINLP programs have been handled with those techniques, achieving good performance while trading exactness off. Techniques in the categories PSO and GA have been found to be the most popular in the last years. As can be observed in Table 2, modifications, or new proposals on PSO or GA techniques can be found in single occurrences, while their use in any other form (original, modified or hybridized) for result comparison are greatly used. Other techniques used in the last studies for BESS implementations are Grey Wolf Optimization (GWO) and Whale Optimization Algorithm (WOA).
Ever since it is desired to achieve better solutions while increasing computational efficiency, hybridization takes relevance, as it is shown in recent studies, since this allows to take the advantageous strategies from several techniques and combine them into a single better technique aiming to achieve greater speed of convergence and diversity in solutions in MULTI frameworks. Optimization problems, as could be observed in the corresponding section, are commonly formulated in mono-objective framework, even when the aim of the problem is to optimize several objectives. This is done so because it simplifies the execution of the program and facilitates any possible linearization or relaxation. However, this reduction in the dimension of the objective space results in the individualization of the solution and the subjectivation of the importance of each objective function.
In multi-objective frameworks, the result of the optimization is a set of solutions that cannot be improved in one objective without degrading the others (non-dominated solutions). This adds complexity to the optimization but delivers flexibility when it is desired to have multiple operation setpoints or if there is no objective information regarding objective weights. As could be observed, the multi-objective framework (MULTI) is recurrent in recent studies, and newly developed metaheuristic techniques are mainly assessed within this framework. It is worth noticing that the pareto dominance criteria is still the most common technique implemented in MO metaheuristic algorithms to select the best solutions. However, the criteria comparing such solutions has also been subject of research, such as TOPSIS, ε-dominance or RPNS.
On the other hand, due to the uncertain nature of the primary resources in RES, Stochastic optimization (STOC) and Robust optimization (RO) have taken relevance in the studies reviewed and are now presented as computational cost-effective alternatives to Monte-Carlo simulations. Within STOC and RO optimization frameworks, LP implementations are possible by introducing relaxations and if probability distributions are represented by convex functions.
Finally, it is worth noticing how multiple optimization stages are now being implemented in BESS research. As observed in Table 2, a Bi-Layer Optimization (BLO) framework has been frequently proposed in recent studies, in which one optimization layer typically optimizes short term operation problems while the other optimizes, partially based on results of the other layer, long term (planning) problems.
5. CONCLUSIONS
In this paper, an overview of the role of BESS in the penetration of RES in power systems and the different advantages of their implementation found in recent literature are presented in the introduction. Then characteristics of BESS chemistries is presented in terms of efficiency and energy density. From this overview, LIB technology is detailed due to trending research and its increasing participation in the operation of power systems, especially in terms of demand patterns for EV and Vehicle to Grid frameworks. Later, a summary of BESS operation and optimization frameworks is presented. Subsequently, a review on the formulation of optimization problems related to BESS as ancillary services provider is presented and objective functions formulated in recent studies are detailed. Next, an overview of optimization frameworks and techniques is presented considering occurrences in literature published in the last three years (since 2019). Finally, it can be concluded that research including BESS optimization has been increasing exponentially in the last decade. The formulation of optimization problems is not only related to ancillary services, but also to support standalone operation or operation support in microgrids and depending on the timeframe of analysis, the optimization may take place within optimal power flow or control frameworks. Given the formulation of the problem and the scope of research, multiple optimization frameworks are being implemented in recent research considering stochasticity, computational efficiency, and dimensionality of objective space. MH techniques dominates complex, multivariate, multi-objective analysis while relaxations, simplifications, linearization, and single objective construction enable the use of traditional, more efficient, and exact techniques. Well known metaheuristic techniques, such as PSO or GA, have been used often as a reference for comparison in the implementation of new methods aiming to find better solutions more efficiently. Hybridization of MH has been studied showing comparable or improved results and presenting possible alternatives to other well-known MH techniques.
6. ACKNOWLEDGMENTS
I thank professor Dr. Javier Rosero at the Universidad Nacional in Bogotá for his insights on the topics and the continuous feedback and the support provided during the writing process of this review. This work was supported in part by the Ministerio de Ciencia y Tecnología and Universidad Nacional in Colombia under grant “Becas del bicentenario, Corte 1: Formación de capital humano de alto nivel Universidad Nacional de Colombia” BPIN 2019000100026.
CONFLICTS OF INTEREST
The authors declare that there is no conflict of interest.
7. REFERENCES
- arrow_upward [1] Z. Pooranian, J. Abawajy, V. P, and M. Conti, “Scheduling Distributed Energy Resource Operation and Daily Power Consumption for a Smart Building to Optimize Economic and Environmental Parameters,” Energies , vol. 11, no. 6, p. 1348, May 2018, https://doi.org/10.3390/en11061348
- arrow_upward [2] Y. Yang, S. Bremner, C. Menictas, and M. Kay, “Battery energy storage system size determination in renewable energy systems: A review,” Renewable and Sustainable Energy Reviews, vol. 91, pp. 109–125, Aug. 2018, https://doi.org/10.1016/j.rser.2018.03.047
- arrow_upward [3] P. S. Georgilakis and N. D. Hatziargyriou, “Optimal Distributed Generation Placement in Power Distribution Networks: Models, Methods, and Future Research,” IEEE Transactions on Power Systems, vol. 28, no. 3, pp. 3420–3428, Aug. 2013, https://doi.org/10.1109/TPWRS.2012.2237043
- arrow_upward [4] C. Parthasarathy, S. Dasgupta, and A. Gupta, “Optimal sizing of energy storage system and their impacts in hybrid microgrid environment,” in 2017 IEEE Transportation Electrification Conference (ITEC-India), Dec. 2017, pp. 1–6. https://doi.org/10.1109/ITEC-India.2017.8333862
- arrow_upward [5] L. Wei, T. Nakamura, and K. Imai, “Development and optimization of low-speed and high-efficiency permanent magnet generator for micro hydro-electrical generation system,” Renew Energy, vol. 147, part. 1, pp. 1653–1662, Mar. 2020, https://doi.org/10.1016/j.renene.2019.09.049
- arrow_upward [6] O. Gandhi, D. S. Kumar, C. D. Rodríguez-Gallegos, and D. Srinivasan, “Review of power system impacts at high PV penetration Part I: Factors limiting PV penetration,” Solar Energy, vol. 210, no. February, pp. 181–201, Nov. 2020, https://doi.org/10.1016/j.solener.2020.06.097
- arrow_upward [7] M. E. Birk, “Impact of Distributed Energy Resources on Locational Marginal Prices and Electricity Networks,” Massachusetts Institute of Technology, Massachusetts, USA, 2016. [Online]. Available: http://hdl.handle.net/1721.1/104818
- arrow_upward [8] M. Azimian, V. Amir, and S. Javadi, “Economic and Environmental Policy Analysis for Emission-Neutral Multi-Carrier Microgrid Deployment,” Appl Energy, vol. 277, p. 115609, Nov. 2020, https://doi.org/10.1016/j.apenergy.2020.115609
- arrow_upward [9] A. Selim, S. Kamel, F. Jurado, and S. Marrouchi, “Developed Algorithm Based on Lightning Search optimizer and Analytical Technique for Allocation of Distribution Generators,” in 2019 21st International Middle East Power Systems Conference (MEPCON), Dec. 2019, pp. 970–975. https://doi.org/10.1109/MEPCON47431.2019.9008011
- arrow_upward [10] Z. A. Obaid, L. M. Cipcigan, L. Abrahim, and M. T. Muhssin, “Frequency control of future power systems: reviewing and evaluating challenges and new control methods,” Journal of Modern Power Systems and Clean Energy, vol. 7, no. 1, pp. 9–25, Jan. 2019, https://doi.org/10.1007/s40565-018-0441-1
- arrow_upward [11] R. Li, W. Wang, Z. Chen, J. Jiang, and W. Zhang, “A Review of Optimal Planning Active Distribution System: Models, Methods, and Future Researches,” Energies, vol. 10, no. 11, p. 1715, Oct. 2017, https://doi.org/10.3390/en10111715
- arrow_upward [12] H. Lan, H. Yin, S. Wen, Y.-Y. Hong, D. C. Yu, and L. Zhang, “Electrical Energy Forecasting and Optimal Allocation of ESS in a Hybrid Wind-Diesel Power System,” Applied Sciences, vol. 7, no. 2, p. 155, Feb. 2017, https://doi.org/10.3390/app7020155
- arrow_upward [13] Y. Wang, H. Zhao, and P. Li, “Optimal Offering and Operating Strategies for Wind-Storage System Participating in Spot Electricity Markets with Progressive Stochastic-Robust Hybrid Optimization Model Series,” Math Probl Eng, vol. 2019, pp. 1–19, Jul. 2019, https://doi.org/10.1155/2019/2142050
- arrow_upward [14] A. Akbari-Dibavar, K. Zare, and S. Nojavan, “A hybrid stochastic-robust optimization approach for energy storage arbitrage in day-ahead and real-time markets,” Sustain Cities Soc, vol. 49, p. 101600, Aug. 2019, https://doi.org/10.1016/j.scs.2019.101600
- arrow_upward [15] W. J. Farmer and A. J. Rix, “Impact of continuous stochastic and spatially distributed perturbations on power system frequency stability,” Electric Power Systems Research, vol. 201, p. 107536, Dec. 2021, https://doi.org/10.1016/j.epsr.2021.107536
- arrow_upward [16] O. D. Montoya, W. Gil-González, and L. F. Grisales-Noreña, “Relaxed convex model for optimal location and sizing of DGs in DC grids using sequential quadratic programming and random hyperplane approaches,” International Journal of Electrical Power & Energy Systems, vol. 115, p. 105442, Feb. 2020, https://doi.org/10.1016/j.ijepes.2019.105442
- arrow_upward [17] M. N. Alam, B. Das, and V. Pant, “Protection scheme for reconfigurable radial distribution networks in presence of distributed generation,” Electric Power Systems Research, vol. 192, p. 106973, Mar. 2021, https://doi.org/10.1016/j.epsr.2020.106973
- arrow_upward [18] O. D. Montoya, W. Gil-González, and L. F. Grisales-Noreña, “An exact MINLP model for optimal location and sizing of DGs in distribution networks: A general algebraic modeling system approach,” Ain Shams Engineering Journal, vol. 11, no. 2, pp. 409–418, Jun. 2020, https://doi.org/10.1016/j.asej.2019.08.011
- arrow_upward [19] M.-A. Hamidan and F. Borousan, “Optimal planning of distributed generation and battery energy storage systems simultaneously in distribution networks for loss reduction and reliability improvement,” J Energy Storage, vol. 46, p. 103844, Feb. 2022, https://doi.org/10.1016/j.est.2021.103844
- arrow_upward [20] S. Sharma, K. R. Niazi, K. Verma, and T. Rawat, “Coordination of different DGs, BESS and demand response for multi-objective optimization of distribution network with special reference to Indian power sector,” International Journal of Electrical Power & Energy Systems, vol. 121, p. 106074, Oct. 2020, https://doi.org/10.1016/j.ijepes.2020.106074
- arrow_upward [21] T. Aziz, N.-A. Masood, S. R. Deeba, W. Tushar, and C. Yuen, “A methodology to prevent cascading contingencies using BESS in a renewable integrated microgrid,” International Journal of Electrical Power & Energy Systems, vol. 110, pp. 737–746, Sep. 2019, https://doi.org/10.1016/j.ijepes.2019.03.068
- arrow_upward [22] A. C. Duman, H. S. Erden, Ö. Gönül, and Ö. Güler, “Optimal sizing of PV-BESS units for home energy management system-equipped households considering day-ahead load scheduling for demand response and self-consumption,” Energy Build, vol. 267, p. 112164, Jul. 2022, https://doi.org/10.1016/j.enbuild.2022.112164
- arrow_upward [23] A. Kumar et al., “Strategic Allocation and Energy Management of BESS for the Provision of Ancillary Services in Active Distribution Networks,” Energy Procedia, vol. 158, pp. 2972–2978, Feb. 2019, https://doi.org/10.1016/j.egypro.2019.01.963
- arrow_upward [24] F. M. Gonzalez-Longatt and S. M. Alhejaj, “Enabling inertial response in utility-scale battery energy storage system,” 2016 IEEE Innovative Smart Grid Technologies - Asia (ISGT-Asia), Nov. 2016, pp. 605–610. https://doi.org/10.1109/ISGT-Asia.2016.7796453
- arrow_upward [25] Y. Jiao, J. Wu, Q. Tan, Z. Tan, and G. Wang, “An Optimization Model and Modified Harmony Search Algorithm for Microgrid Planning with ESS,” Discrete Dyn Nat Soc, vol. 2017, pp. 1–11, Aug. 2017, https://doi.org/10.1155/2017/8425458
- arrow_upward [26] Y.-K. Wu and K.-T. Tang, “Frequency Support by BESS – Review and Analysis,” Energy Procedia, vol. 156, pp. 187–191, Jan. 2019, https://doi.org/10.1016/j.egypro.2018.11.126
- arrow_upward [27] A. Zecchino, Z. Yuan, F. Sossan, R. Cherkaoui, and M. Paolone, “Optimal provision of concurrent primary frequency and local voltage control from a BESS considering variable capability curves: Modelling and experimental assessment,” Electric Power Systems Research, vol. 190, p. 106643, Jan. 2021, https://doi.org/10.1016/j.epsr.2020.106643
- arrow_upward [28] M. Stecca, L. Ramirez Elizondo, T. Batista Soeiro, P. Bauer, and P. Palensky, “A Comprehensive Review of the Integration of Battery Energy Storage Systems into Distribution Networks,” IEEE Open Journal of the Industrial Electronics Society, vol. 1, pp. 46–65, Mar. 2020, https://doi.org/10.1109/OJIES.2020.2981832
- arrow_upward [29] I. Hadjipaschalis, A. Poullikkas, and V. Efthimiou, “Overview of current and future energy storage technologies for electric power applications,” Renewable and Sustainable Energy Reviews, vol. 13, no. 6–7, pp. 1513–1522, Aug. 2009, https://doi.org/10.1016/j.rser.2008.09.028
- arrow_upward [30] M. Aneke and M. Wang, “Energy storage technologies and real life applications – A state of the art review,” Appl Energy, vol. 179, pp. 350–377, Oct. 2016, https://doi.org/10.1016/j.apenergy.2016.06.097
- arrow_upward [31] G. Zubi, R. Dufo-López, M. Carvalho, and G. Pasaoglu, “The lithium-ion battery: State of the art and future perspectives,” Renewable and Sustainable Energy Reviews, vol. 89, no. April, pp. 292–308, Jun. 2018, https://doi.org/10.1016/j.rser.2018.03.002
- arrow_upward [32] L. Maeyaert, L. Vandevelde, and T. Döring, “Battery Storage for Ancillary Services in Smart Distribution Grids,” J Energy Storage, vol. 30, p. 101524, Aug. 2020, https://doi.org/10.1016/j.est.2020.101524
- arrow_upward [33] R. Sakipour and H. Abdi, “Voltage stability improvement of wind farms by self-correcting static volt-ampere reactive compensator and energy storage,” International Journal of Electrical Power & Energy Systems, vol. 140, p. 108082, Sep. 2022, https://doi.org/10.1016/j.ijepes.2022.108082
- arrow_upward [34] L. B. Raju and K. S. Rao, “WITHDRAWN: Control and stability of micro grids during transient states,” Mater Today Proc, Jan. 2021, https://doi.org/10.1016/j.matpr.2020.11.057
- arrow_upward [35] H. A. Khalid, N. A. Al-Emadi, L. Ben-Brahim, A. Gastli, and C. Cecati, “A novel model predictive control with an integrated SOC and floating DC-link voltage balancing for 3-phase 7-level PUC converter-based MV BESS,” International Journal of Electrical Power & Energy Systems, vol. 130, p. 106895, Sep. 2021, https://doi.org/10.1016/j.ijepes.2021.106895
- arrow_upward [36] R. Babu, V. G. Rao, and S. Rao, “Battery energy integrated active power filter for harmonic compensation and active power injection,” Sustainable Computing: Informatics and Systems, vol. 35, p. 100664, Sep. 2022, https://doi.org/10.1016/j.suscom.2022.100664
- arrow_upward [37] S. Fahad, A. Goudarzi, Y. Li, and J. Xiang, “A coordination control strategy for power quality enhancement of an active distribution network,” Energy Reports, vol. 8, pp. 5455–5471, Nov. 2022, https://doi.org/10.1016/j.egyr.2022.04.014
- arrow_upward [38] Y. Li, L. Zhang, K. Lai, and X. Zhang, “Dynamic state estimation method for multiple battery energy storage systems with droop-based consensus control,” International Journal of Electrical Power & Energy Systems, vol. 134, p. 107328, Jan. 2022, https://doi.org/10.1016/j.ijepes.2021.107328
- arrow_upward [39] N. Bizon, “Effective mitigation of the load pulses by controlling the battery/SMES hybrid energy storage system,” Appl Energy, vol. 229, no. July, pp. 459–473, Nov. 2018, https://doi.org/10.1016/j.apenergy.2018.08.013
- arrow_upward [40] A. J. Abianeh and F. Ferdowsi, “Sliding Mode Control Enabled Hybrid Energy Storage System for Islanded DC Microgrids with Pulsing Loads,” Sustain Cities Soc, vol. 73, p. 103117, Oct. 2021, https://doi.org/10.1016/j.scs.2021.103117
- arrow_upward [41] R. Li, W. Wang, Z. Chen, and X. Wu, “Optimal planning of energy storage system in active distribution system based on fuzzy multi-objective bi-level optimization,” Journal of Modern Power Systems and Clean Energy, vol. 6, no. 2, pp. 342–355, Mar. 2018, https://doi.org/10.1007/s40565-017-0332-x
- arrow_upward [42] S. A. Hosseini, M. Toulabi, A. Ashouri-Zadeh, and A. M. Ranjbar, “Battery energy storage systems and demand response applied to power system frequency control,” International Journal of Electrical Power & Energy Systems, vol. 136, p. 107680, Mar. 2022, https://doi.org/10.1016/j.ijepes.2021.107680
- arrow_upward [43] W. Xing, H. Wang, L. Lu, X. Han, K. Sun, and M. Ouyang, “An adaptive virtual inertia control strategy for distributed battery energy storage system in microgrids,” Energy, vol. 233, p. 121155, Oct. 2021, https://doi.org/10.1016/j.energy.2021.121155
- arrow_upward [44] M. Hajiakbari Fini and M. E. Hamedani Golshan, “Determining optimal virtual inertia and frequency control parameters to preserve the frequency stability in islanded microgrids with high penetration of renewables,” Electric Power Systems Research, vol. 154, pp. 13–22, Jan. 2018, https://doi.org/10.1016/j.epsr.2017.08.007
- arrow_upward [45] J. Liu, D. Yang, W. Yao, R. Fang, H. Zhao, and B. Wang, “PV-based virtual synchronous generator with variable inertia to enhance power system transient stability utilizing the energy storage system,” Protection and Control of Modern Power Systems, vol. 2, no. 1, p. 39, Nov. 2017, https://doi.org/10.1186/s41601-017-0070-0
- arrow_upward [46] Y. Zhao et al., “Energy storage for black start services: A review,” International Journal of Minerals, Metallurgy and Materials, vol. 29, no. 4, pp. 691–704, Apr. 2022, https://doi.org/10.1007/s12613-022-2445-0
- arrow_upward [47] M. E. Hassanzadeh, M. Nayeripour, S. Hasanvand, and E. Waffenschmidt, “Decentralized control strategy to improve dynamic performance of micro-grid and reduce regional interactions using BESS in the presence of renewable energy resources,” J Energy Storage, vol. 31, p. 101520, Oct. 2020, https://doi.org/10.1016/j.est.2020.101520
- arrow_upward [48] S. Bin Wali et al., “Battery storage systems integrated renewable energy sources: A biblio metric analysis towards future directions,” J Energy Storage, vol. 35, p. 102296, Mar. 2021, https://doi.org/10.1016/j.est.2021.102296
- arrow_upward [49] O. B. Adewuyi, R. Shigenobu, K. Ooya, T. Senjyu, and A. M. Howlader, “Static voltage stability improvement with battery energy storage considering optimal control of active and reactive power injection,” Electric Power Systems Research, vol. 172, pp. 303–312, Jul. 2019, https://doi.org/10.1016/j.epsr.2019.04.004
- arrow_upward [50] H. A. Khan, M. Zuhaib, and M. Rihan, “Voltage fluctuation mitigation with coordinated OLTC and energy storage control in high PV penetrating distribution network,” Electric Power Systems Research, vol. 208, p. 107924, Jul. 2022, https://doi.org/10.1016/j.epsr.2022.107924
- arrow_upward [51] B. Ahmadi, O. Ceylan, and A. Ozdemir, “Voltage Profile Improving And Peak Shaving Using Multi-type Distributed Generators And Battery Energy Storage Systems In Distribution Networks,” in 2020 55th International Universities Power Engineering Conference (UPEC), Sep. 2020, pp. 1–6. https://doi.org/10.1109/UPEC49904.2020.9209880
- arrow_upward [52] S. Zhang, H. Liu, F. Wang, T. Yan, and K. Wang, “Secondary frequency control strategy for BESS considering their degree of participation,” Energy Reports, vol. 6, supp. 9, pp. 594–602, Dec. 2020, https://doi.org/10.1016/j.egyr.2020.11.183
- arrow_upward [53] S. K. Gupta, T. Ghose, and K. Chatterjee, “Coordinated control of Incentive-Based Demand Response Program and BESS for frequency regulation in low inertia isolated grid,” Electric Power Systems Research, vol. 209, p. 108037, Aug. 2022, https://doi.org/10.1016/j.epsr.2022.108037
- arrow_upward [54] E. Pusceddu, B. Zakeri, and G. Castagneto Gissey, “Synergies between energy arbitrage and fast frequency response for battery energy storage systems,” Appl Energy, vol. 283, p. 116274, Feb. 2021, https://doi.org/10.1016/j.apenergy.2020.116274
- arrow_upward [55] M. B. Mustafa, P. Keatley, Y. Huang, O. Agbonaye, O. O. Ademulegun, and N. Hewitt, “Evaluation of a battery energy storage system in hospitals for arbitrage and ancillary services,” J Energy Storage, vol. 43, p. 103183, Nov. 2021, https://doi.org/10.1016/j.est.2021.103183
- arrow_upward [56] P. L. C. García-Miguel, A. P. Asensio, J. L. Merino, and M. G. Plaza, “Analysis of cost of use modelling impact on a battery energy storage system providing arbitrage service,” J Energy Storage, vol. 50, p. 104203, Jun. 2022, https://doi.org/10.1016/j.est.2022.104203
- arrow_upward [57] R. Zhang, N. Zhou, X. Meng, Y. Chi, Q. Wang, and M. Zhang, “A new starting capability assessment method for induction motors in an industrial islanded microgrid with diesel generators and energy storage systems,” Electric Power Systems Research, vol. 210, p. 108099, Sep. 2022, https://doi.org/10.1016/j.epsr.2022.108099
- arrow_upward [58] M. B. Sanjareh, M. H. Nazari, G. B. Gharehpetian, R. Ahmadiahangar, and A. Rosin, “Optimal scheduling of HVACs in islanded residential microgrids to reduce BESS size considering effect of discharge duration on voltage and capacity of battery cells,” Sustainable Energy, Grids and Networks, vol. 25, p. 100424, Mar. 2021, https://doi.org/10.1016/j.segan.2020.100424
- arrow_upward [59] M. M. Rana, M. F. Romlie, M. F. Abdullah, M. Uddin, and M. R. Sarkar, “A novel peak load shaving algorithm for isolated microgrid using hybrid PV-BESS system,” Energy, vol. 234, p. 121157, Nov. 2021, https://doi.org/10.1016/j.energy.2021.121157
- arrow_upward [60] S. Lakshmi and S. Ganguly, “Multi-objective planning for the allocation of PV-BESS integrated open UPQC for peak load shaving of radial distribution networks,” J Energy Storage, vol. 22, pp. 208–218, Apr. 2019, https://doi.org/10.1016/j.est.2019.01.011
- arrow_upward [61] E. Diotama, R. Irnawan, L. M. Putranto, and Sarjiya, “ANN for Optimal Operation of BESS in a Grid Integrated Wind Farm,” in 2020 FORTEI-International Conference on Electrical Engineering (FORTEI-ICEE), Sep. 2020, pp. 96–101. https://doi.org/10.1109/FORTEI-ICEE50915.2020.9249874
- arrow_upward [62] N. Vazquez, S. S. Yu, T. K. Chau, T. Fernando, and H. H.-C. Iu, “A Fully Decentralized Adaptive Droop Optimization Strategy for Power Loss Minimization in Microgrids With PV-BESS,” IEEE Transactions on Energy Conversion, vol. 34, no. 1, pp. 385–395, Mar. 2019, https://doi.org/10.1109/TEC.2018.2878246
- arrow_upward [63] J. Hazra, M. Padmanaban, F. Zaini, and L. C. de Silva, “Congestion relief using grid scale batteries,” in 2015 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Feb. 2015, pp. 1–5. https://doi.org/10.1109/ISGT.2015.7131789
- arrow_upward [64] D. Ranamuka, K. M. Muttaqi, and D. Sutanto, “Flexible AC Power Flow Control in Distribution Systems by Coordinated Control of Distributed Solar-PV and Battery Energy Storage Units,” IEEE Trans Sustain Energy, vol. 11, no. 4, pp. 2054–2062, Oct. 2020, https://doi.org/10.1109/TSTE.2019.2935479
- arrow_upward [65] A. Paladin et al., “Micro market based optimisation framework for decentralised management of distributed flexibility assets,” Renew Energy, vol. 163, pp. 1595–1611, Jan. 2021, https://doi.org/10.1016/j.renene.2020.10.003
- arrow_upward [66] H. Mehrjerdi, E. Rakhshani, and A. Iqbal, “Substation expansion deferral by multi-objective battery storage scheduling ensuring minimum cost,” J Energy Storage, vol. 27, p. 101119, Feb. 2020, https://doi.org/10.1016/j.est.2019.101119
- arrow_upward [67] M. Mossaddek et al., “Nonlinear modeling of lithium-ion battery,” Mater Today Proc, vol. 66, part. 1, pp. 80–84, 2022, https://doi.org/10.1016/j.matpr.2022.03.302
- arrow_upward [68] M. Kamruzzaman, X. Zhang, M. Abdelmalak, D. Shi, and M. Benidris, “A data-driven accurate battery model to use in probabilistic analyses of power systems,” J Energy Storage, vol. 44, part. A, p. 103292, Dec. 2021, https://doi.org/10.1016/j.est.2021.103292
- arrow_upward [69] E. M. Krieger and C. B. Arnold, “Effects of undercharge and internal loss on the rate dependence of battery charge storage efficiency,” J Power Sources, vol. 210, pp. 286–291, Jul. 2012, https://doi.org/10.1016/j.jpowsour.2012.03.029
- arrow_upward [70] A. Allahham, D. Greenwood, C. Patsios, and P. Taylor, “Adaptive receding horizon control for battery energy storage management with age-and-operation-dependent efficiency and degradation,” Electric Power Systems Research, vol. 209, p. 107936, Aug. 2022, https://doi.org/10.1016/j.epsr.2022.107936
- arrow_upward [71] H. Saboori and S. Jadid, “Mobile and self-powered battery energy storage system in distribution networks–Modeling, operation optimization, and comparison with stationary counterpart,” J Energy Storage, vol. 42, p. 103068, Oct. 2021, https://doi.org/10.1016/j.est.2021.103068
- arrow_upward [72] S. H. Low, “Convex Relaxation of Optimal Power Flow—Part I: Formulations and Equivalence,” IEEE Trans Control Netw Syst, vol. 1, no. 1, pp. 15–27, Mar. 2014, https://doi.org/10.1109/TCNS.2014.2309732
- arrow_upward [73] M. Dorigo, M. Birattari, and T. Stützle, “Metaheuristic,” in Encyclopedia of Machine Learning and Data Mining, C. Sammut and G. I. Webb, Eds. Boston, MA: Springer US, 2017, pp. 817–818. https://doi.org/10.1007/978-1-4899-7687-1_537
- arrow_upward [74] M. Gendreau and J.-Y. Potvin, “Metaheuristics in Combinatorial Optimization,” Ann Oper Res, vol. 140, no. 1, pp. 189–213, Nov. 2005, https://doi.org/10.1007/s10479-005-3971-7
- arrow_upward [75] Y. Zhu, C. Liu, R. Dai, G. Liu, and Y. Xu, “Optimal Battery Energy Storage Placement for Transient Voltage Stability Enhancement,” 2019 IEEE Power & Energy Society General Meeting (PESGM), Aug. 2019, pp. 1–5. https://doi.org/10.1109/PESGM40551.2019.8973610
- arrow_upward [76] J. Qi, W. Huang, K. Sun, and W. Kang, “Optimal Placement of Dynamic Var Sources by Using Empirical Controllability Covariance,” IEEE Transactions on Power Systems, vol. 32, no. 1, pp. 240–249, Jan. 2017, https://doi.org/10.1109/TPWRS.2016.2552481
- arrow_upward [77] N. Cifuentes, C. Rahmann, F. Valencia, and R. Alvarez, “Network allocation of BESS with voltage support capability for improving the stability of power systems,” IET Generation, Transmission & Distribution, vol. 13, no. 6, pp. 939–949, Mar. 2019, https://doi.org/10.1049/iet-gtd.2018.6265
- arrow_upward [78] I. Martínez Sanz, B. Stojkovska, A. Wilks, J. Horne, A. R. Ahmadi, and T. Ustinova, “Enhancing transmission and distribution system coordination and control in GB using power services from DERs,” The Journal of Engineering, vol. 2019, no. 18, pp. 4911–4915, Jul. 2019, https://doi.org/10.1049/joe.2018.9303
- arrow_upward [79] H. Zhu and H. J. Liu, “Fast Local Voltage Control Under Limited Reactive Power: Optimality and Stability Analysis,” IEEE Transactions on Power Systems, vol. 31, no. 5, pp. 3794–3803, Sep. 2016, https://doi.org/10.1109/TPWRS.2015.2504419
- arrow_upward [80] T. Zhao, A. Parisio, and J. V. Milanović, “Distributed control of battery energy storage systems in distribution networks for voltage regulation at transmission–distribution network interconnection points,” Control Eng Pract, vol. 119, p. 104988, Feb. 2022, https://doi.org/10.1016/j.conengprac.2021.104988
- arrow_upward [81] M. R. Nayak, D. Behura, and K. Kasturi, “Optimal allocation of energy storage system and its benefit analysis for unbalanced distribution network with wind generation,” J Comput Sci, vol. 51, p. 101319, Apr. 2021, https://doi.org/10.1016/j.jocs.2021.101319
- arrow_upward [82] C. R. Reddy, B. S. Goud, F. Aymen, G. S. Rao, and E. C. Bortoni, “Power Quality Improvement in HRES Grid Connected System with FOPID Based Atom Search Optimization Technique,” Energies , vol. 14, no. 18, p. 5812, Sep. 2021, https://doi.org/10.3390/en14185812
- arrow_upward [83] J. Li, H. You, J. Qi, M. Kong, S. Zhang, and H. Zhang, “Stratified Optimization Strategy Used for Restoration With Photovoltaic-Battery Energy Storage Systems as Black-Start Resources,” IEEE Access, vol. 7, pp. 127339–127352, Aug. 2019, https://doi.org/10.1109/ACCESS.2019.2937833
- arrow_upward [84] S. Li, Q. Xu, Y. Xia, and K. Hua, “Comprehensive setting and optimization of Dead-Band for BESS participate in power grid primary frequency regulation,” International Journal of Electrical Power & Energy Systems, vol. 141, p. 108195, Oct. 2022, https://doi.org/10.1016/j.ijepes.2022.108195
- arrow_upward [85] K. Wen, W. Li, S. S. Yu, P. Li, and P. Shi, “Optimal intra-day operations of behind-the-meter battery storage for primary frequency regulation provision: A hybrid lookahead method,” Energy, vol. 247, p. 123482, May 2022, https://doi.org/10.1016/j.energy.2022.123482
- arrow_upward [86] Y. Li et al., “Optimal battery schedule for grid-connected photovoltaic-battery systems of office buildings based on a dynamic programming algorithm,” J Energy Storage, vol. 50, p. 104557, Jun. 2022, https://doi.org/10.1016/j.est.2022.104557
- arrow_upward [87] X. Zhang, Y. Son, and S. Choi, “Optimal Scheduling of Battery Energy Storage Systems and Demand Response for Distribution Systems with High Penetration of Renewable Energy Sources,” Energies , vol. 15, no. 6, p. 2212, Mar. 2022, https://doi.org/10.3390/en15062212
- arrow_upward [88] T. Gu et al., “Placement and capacity selection of battery energy storage system in the distributed generation integrated distribution network based on improved NSGA-II optimization,” J Energy Storage, vol. 52, part. A, p. 104716, Aug. 2022, https://doi.org/10.1016/j.est.2022.104716
- arrow_upward [89] R. Tarife, Y. Nakanishi, Y. Chen, Y. Zhou, N. Estoperez, and A. Tahud, “Optimization of Hybrid Renewable Energy Microgrid for Rural Agricultural Area in Southern Philippines,” Energies , vol. 15, no. 6, p. 2251, Mar. 2022, https://doi.org/10.3390/en15062251
- arrow_upward [90] R. A. Thokar, N. Gupta, K. R. Niazi, A. Swarnkar, S. Sharma, and K. Meena, “Optimal Integration and Management of Solar Generation and Battery Storage System in Distribution Systems under Uncertain Environment,” International Journal of Renewable Energy Research, vol. 10, no. 1, pp. 11–12, Mar. 2020, https://doi.org/10.20508/ijrer.v10i1.10130.g7832
- arrow_upward [91] Q. Chai, C. Zhang, Z. Dong, and W. Chen, “Optimal Daily Scheduling of Distributed Battery Energy Storage Systems Considering Battery Degradation Cost,” 2021 IEEE Power & Energy Society General Meeting (PESGM), Jul. 2021, pp. 1–5. https://doi.org/10.1109/PESGM46819.2021.9638252
- arrow_upward [92] J. Kennedy., “Particle Swarm Optimization,” in Encyclopedia of Machine Learning, C. Sammut and G. I. Webb, Eds. Boston, MA: Springer US, 2011, pp. 760–766. https://doi.org/10.1007/978-0-387-30164-8_630
- arrow_upward [93] Z. Yuan, W. Wang, H. Wang, and A. Yildizbasi, “A new methodology for optimal location and sizing of battery energy storage system in distribution networks for loss reduction,” J Energy Storage, vol. 29, p. 101368, Jun. 2020, https://doi.org/10.1016/j.est.2020.101368
- arrow_upward [94] S. Mikulski and A. Tomczewski, “Use of Energy Storage to Reduce Transmission Losses in Meshed Power Distribution Networks,” Energies, vol. 14, no. 21, p. 7304, Nov. 2021, https://doi.org/10.3390/en14217304
- arrow_upward [95] P. Boonluk, A. Siritaratiwat, P. Fuangfoo, and S. Khunkitti, “Optimal Siting and Sizing of Battery Energy Storage Systems for Distribution Network of Distribution System Operators,” Batteries, vol. 6, no. 4, p. 56, Nov. 2020, https://doi.org/10.3390/batteries6040056
- arrow_upward [96] P. Boonluk, S. Khunkitti, P. Fuangfoo, and A. Siritaratiwat, “Optimal Siting and Sizing of Battery Energy Storage: Case Study Seventh Feeder at Nakhon Phanom Substation in Thailand,” Energies, vol. 14, no. 5, p. 1458, Mar. 2021, https://doi.org/10.3390/en14051458
- arrow_upward [97] V. Janamala and D. Sreenivasulu Reddy, “Coyote optimization algorithm for optimal allocation of interline –Photovoltaic battery storage system in islanded electrical distribution network considering EV load penetration,” J Energy Storage, vol. 41, p. 102981, Sep. 2021, https://doi.org/10.1016/j.est.2021.102981
- arrow_upward [98] M. Malik and P. R. Sharma, “Optimal siting and sizing of hybrid PV and wind energy distribution network,” Soft comput, vol. 26, no. 11, pp. 5335–5346, Jun. 2022, https://doi.org/10.1007/s00500-022-06911-5
- arrow_upward [99] İ. Çetinbaş, B. Tamyürek, and M. Demirtaş, “Sizing optimization and design of an autonomous AC microgrid for commercial loads using Harris Hawks Optimization algorithm,” Energy Convers Manag, vol. 245, p. 114562, Oct. 2021, https://doi.org/10.1016/j.enconman.2021.114562
- arrow_upward [100] M. Talaat, B. E. Sedhom, and A. Y. Hatata, “A new approach for integrating wave energy to the grid by an efficient control system for maximum power based on different optimization techniques,” International Journal of Electrical Power & Energy Systems, vol. 128, p. 106800, Jun. 2021, https://doi.org/10.1016/j.ijepes.2021.106800
- arrow_upward [101] R. Sakipour and H. Abdi, “Optimizing Battery Energy Storage System Data in the Presence of Wind Power Plants: A Comparative Study on Evolutionary Algorithms,” Sustainability, vol. 12, no. 24, p. 10257, Dec. 2020, https://doi.org/10.3390/su122410257
- arrow_upward [102] J.-W. Lee, M.-K. Kim, and H.-J. Kim, “A Multi-Agent Based Optimization Model for Microgrid Operation with Hybrid Method Using Game Theory Strategy,” Energies , vol. 14, no. 3, p. 603, Jan. 2021, https://doi.org/10.3390/en14030603
- arrow_upward [103] D. E. Goldberg, Genetic Algorithms in Search, Optimization, and Machine Learning. Addison-Wesley, 1989. [Online]. Available: https://books.google.com.co/books?id=2IIJAAAACAAJ
- arrow_upward [104] K. E. Adetunji, I. W. Hofsajer, A. M. Abu-Mahfouz, and L. Cheng, “Category-Based Multiobjective Approach for Optimal Integration of Distributed Generation and Energy Storage Systems in Distribution Networks,” IEEE Access, vol. 9, pp. 28237–28250, Feb. 2021, https://doi.org/10.1109/ACCESS.2021.3058746
- arrow_upward [105] S. Subramanian, C. Sankaralingam, R. M. Elavarasan, R. R. Vijayaraghavan, K. Raju, and L. Mihet-Popa, “An Evaluation on Wind Energy Potential Using Multi-Objective Optimization Based Non-Dominated Sorting Genetic Algorithm III,” Sustainability, vol. 13, no. 1, p. 410, Jan. 2021, https://doi.org/10.3390/su13010410
- arrow_upward [106] X. Zhang, Y. Son, T. Cheong, and S. Choi, “Affine-arithmetic-based microgrid interval optimization considering uncertainty and battery energy storage system degradation,” Energy, vol. 242, p. 123015, Mar. 2022, https://doi.org/10.1016/j.energy.2021.123015
- arrow_upward [107] Z. Yuan, W. Wang, H. Wang, and A. Yıldızbaşı, “Allocation and sizing of battery energy storage system for primary frequency control based on bio-inspired methods: A case study,” Int J Hydrogen Energy, vol. 45, no. 38, pp. 19455–19464, Jul. 2020, https://doi.org/10.1016/j.ijhydene.2020.05.013
- arrow_upward [108] C. Leone, M. Longo, L. M. Fernandez-Ramirez, and P. Garcia-Trivino, “Multi-Objective Optimization of PV and Energy Storage Systems for Ultra-Fast Charging Stations,” IEEE Access, vol. 10, pp. 14208–14224, Jan. 2022, https://doi.org/10.1109/ACCESS.2022.3147672
- arrow_upward [109] Z. Huang, P. Ma, M. Wang, B. Fang, and M. Zhang, “A Hierarchical Strategy for Multi-Objective Optimization of Distribution Network Considering DGs and V2G-Enabled EVs Integration,” Front Energy Res, vol. 10, pp. 1–13, Mar. 2022, https://doi.org/10.3389/fenrg.2022.869844
- arrow_upward [110] S. Mirjalili, S. M. Mirjalili, and A. Lewis, “Grey Wolf Optimizer,” Advances in Engineering Software, vol. 69, pp. 46–61, Mar. 2014, https://doi.org/10.1016/j.advengsoft.2013.12.007
- arrow_upward [111] H. Abdel-Mawgoud, A. Fathy, and S. Kamel, “An effective hybrid approach based on arithmetic optimization algorithm and sine cosine algorithm for integrating battery energy storage system into distribution networks,” J Energy Storage, vol. 49, , p. 104154, May 2022, https://doi.org/10.1016/j.est.2022.104154
- arrow_upward [112] A. Pal, A. Bhattacharya, and A. K. Chakraborty, “Placement of Public Fast-Charging Station and Solar Distributed Generation with Battery Energy Storage in Distribution Network Considering Uncertainties and Traffic Congestion,” J Energy Storage, vol. 41, p. 102939, Sep. 2021, https://doi.org/10.1016/j.est.2021.102939
- arrow_upward [113] R. Muthukumar and P. Balamurugan, “A model predictive controller for improvement in power quality from a hybrid renewable energy system,” Soft comput, vol. 23, no. 8, pp. 2627–2635, Apr. 2019, https://doi.org/10.1007/s00500-018-3626-7
- arrow_upward [114] N. Bacanin, “Hybrid multi agent optimization for optimal battery storage using micro grid,” Expert Syst, pp. 1–16, Mar. 2022, https://doi.org/10.1111/exsy.12995
- arrow_upward [115] B. Mukhopadhyay and D. Das, “Optimal multi-objective expansion planning of a droop-regulated islanded microgrid,” Energy, vol. 218, p. 119415, Mar. 2021, https://doi.org/10.1016/j.energy.2020.119415
- arrow_upward [116] S. Mirjalili and A. Lewis, “The Whale Optimization Algorithm,” Advances in Engineering Software, vol. 95, pp. 51–67, May 2016, https://doi.org/10.1016/j.advengsoft.2016.01.008
- arrow_upward [117] L. A. Wong, V. K. Ramachandaramurthy, S. L. Walker, and J. B. Ekanayake, “Optimal Placement and Sizing of Battery Energy Storage System Considering the Duck Curve Phenomenon,” IEEE Access, vol. 8, pp. 197236–197248, Oct. 2020, https://doi.org/10.1109/ACCESS.2020.3034349
- arrow_upward [118] M. Mohammadjafari, R. Ebrahimi, and V. Parvin Darabad, “Optimal Energy Management of a Microgrid Incorporating a Novel Efficient Demand Response and Battery Storage System,” Journal of Electrical Engineering & Technology, vol. 15, no. 2, pp. 571–590, Mar. 2020, https://doi.org/10.1007/s42835-020-00345-5
- arrow_upward [119] A. A. Heidari, S. Mirjalili, H. Faris, I. Aljarah, M. Mafarja, and H. Chen, “Harris hawks optimization: Algorithm and applications,” Future Generation Computer Systems, vol. 97, pp. 849–872, Aug. 2019, https://doi.org/10.1016/j.future.2019.02.028
- arrow_upward [120] X.-S. Yang, Nature-inspired metaheuristic algorithms, Second edition, 2nd. Frome, England: Luniver Press, 2010. [Online]. Available: https://staff.fmi.uvt.ro/~daniela.zaharie/ma2016/projects/techniques/FireflyAlgorithm/Yang_nature_book_part.pdf
- arrow_upward [121] I. Çetinbaş, B. Tamyürek, and M. Demırtaş, “The Hybrid Harris Hawks Optimizer-Arithmetic Optimization Algorithm: A New Hybrid Algorithm for Sizing Optimization and Design of Microgrids,” IEEE Access, vol. 10, pp. 19254–19283, Feb. 2022, https://doi.org/10.1109/ACCESS.2022.3151119
- arrow_upward [122] S. Z. Mirjalili, S. Mirjalili, S. Saremi, H. Faris, and I. Aljarah, “Grasshopper optimization algorithm for multi-objective optimization problems,” Applied Intelligence, vol. 48, no. 4, pp. 805–820, Apr. 2018, https://doi.org/10.1007/s10489-017-1019-8
- arrow_upward [123] S. Mirjalili, S. Saremi, S. M. Mirjalili, and L. dos S. Coelho, “Multi-objective grey wolf optimizer: A novel algorithm for multi-criterion optimization,” Expert Syst Appl, vol. 47, pp. 106–119, Apr. 2016, https://doi.org/10.1016/j.eswa.2015.10.039

